摘要:随着无人机(UAV)系统的规模持续扩大以及对更高通信速率的需求增长,UAV光移动通信(UAV-OMC)已经成为一个有前景的技术方向。然而,传统的UAV-OMC难以支持多UAV之间的通信。该文基于光学智能反
随着无人机(UAV)系统的规模持续扩大以及对更高通信速率的需求增长,UAV光移动通信(UAV-OMC)已经成为一个有前景的技术方向。然而,传统的UAV-OMC难以支持多UAV之间的通信。该文基于光学智能反射表面(OIRS)技术,提出一个适用于UAV群的分布式OMC系统。
通过在特定的UAV上设置OIRS,利用OIRS将光信号从单个UAV节点扩散到多个UAV节点。这一系统在保留UAV-OMC系统的高能效和高速度的同时,能够支持分布式UAV群的通信。对所提出的系统进行了数学建模,考虑了一系列现实因素,如OIRS的光束控制、UAV之间的相对运动和UAV的抖动等,这些因素都符合实际系统的特点。此外,该文还推导出了系统的误比特率(BER)和渐进中断概率的闭式表达式。基于理论分析和模拟结果,讨论了各个参数和系统设计的影响。
关键词:光移动通信;光学智能反射表面;无人机;性能分析
论文《光学智能反射表面辅助的UAV群分布式光移动通信》发表在《电子与信息学报》,版权归《电子与信息学报》所有。本文来自网络平台,仅供参考。
1 引言
随着无人机(Unmanned Aerial Vehicle, UAV)技术的发展,人们提出了包括UAV高空基站、UAV 3维测绘等新的应用,这些应用需要更高的通信速率和更宽的带宽[1–3]。作为一种面向移动通信场景的、具有高能效、宽带宽和高速度特点的无线通信方式,光移动通信(Optical Mobile Communications, OMC)已成为UAV通信的一个重要发展方向[1,4]。
然而,传统的UAV光移动通信(UAV Optical Mobile Communications, UAV-OMC)系统主要面向点对点传输。随着UAV数量的增加,传统的UAV-OMC系统难以满足多UAV的实时高速通信需求[1–4]。因此,需要一种技术,既能保留UAV-OMC系统的高能效和高速度,又能支持多UAV通信。
光学智能反射表面(Optical Intelligent Reflecting Surface, OIRS)作为一种新型的可编程被动光通信设备,可以偏转、分裂和重构光束[5–7]。同时,OIRS体积小、重量轻,适合安装在UAV上。因此,基于OIRS技术,本文提出一种适用于UAV群的分布式OMC系统。在特定的UAV上设置OIRS,利用OIRS将光信号从单个UAV节点扩散到多个UAV节点。由于每个OIRS的光束分裂能力和覆盖范围有限,整个UAV群被划分为以多个OIRS为中心的多个区域。每个OIRS负责特定区域内UAV的通信接入和功率分配。OIRS不仅承担光信号转发的功能,还执行光束对准和聚焦,以使每个UAV都能接收到一个聚焦且对准的光束。
传统的UAV-RF系统采用射频(Radio Frequency, RF)广播的方式进行广区域的信号覆盖,以保证UAV群的通信,其通信能效和速率相比UAV-OMC更低[1,2]。与现有的UAV-OMC[8,9]不同,本系统没有使用大直径光束来覆盖多个UAV,仍然在发射端使用高能效和高指向性的激光源。UAV群的信号传输是通过OIRS的反射实现的。因此,整个系统的能源利用效率极高。基站的光信号经OIRS重新聚焦和对准后,传送到每个UAV。与现有的OIRS辅助OMC不同,本系统面向UAV群通信场景,且在UAV上也安装了OIRS。因此,在设计OIRS控制方法、进行信道建模和性能分析时,本系统还需要考虑一系列现实因素,如UAV间的相对运动、OIRS光束对准和UAV抖动,这与传统的陆地侧OIRS不同[8,9]。
本文的贡献如下:
(1) 基于OIRS技术,提出了一种OIRS辅助的UAV群分布式OMC系统。通过在特定的UAV上设置OIRS,利用OIRS将光信号从单个UAV节点扩散到多个UAV节点。这一系统在保留UAV-OMC系统的高能效和高速度的同时,能够支持分布式UAV群的通信。
(2) 对所提出的系统进行了数学建模。在模型建立过程中,考虑了一系列现实因素,如OIRS光束控制、UAV之间的相对运动、UAV抖动和高空强湍流等,这些因素都符合实际系统的特点。
(3) 基于数学模型,分析了UAV群中后端UAV节点的通信性能,以观察使用OIRS的UAV信号传输的性能可靠性。此外,还推导出了系统近似平均误比特率(Bit Error Rate, BER)和渐进中断概率的闭式表达式。同时,讨论了影响系统性能的参数。
2 系统模型
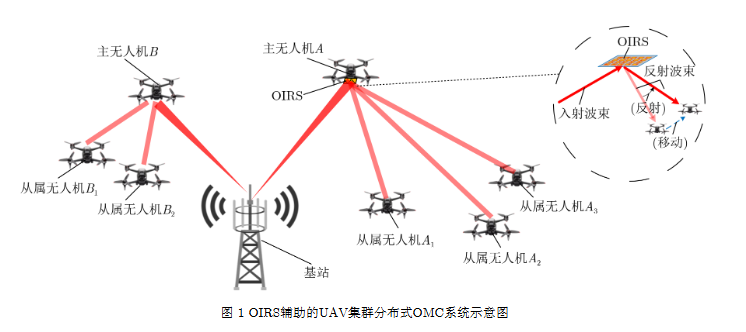
图1是UAV群OIRS辅助分布式OMC系统的示意图。在此系统中,基站向特定的UAV发送光信号,这个UAV可以被称为主UAV。主UAV上的接收机位于OIRS附近,或设置在OIRS的中心,以维持主UAV的通信。主UAV上的OIRS将光信号分裂并反射到从属UAV,进行通信。因此,在此系统中,基站只需将光束直接对准主UAV上的OIRS,进一步简化了光束对准过程。这种UAV群OMC网络具有进一步扩展的潜力。从属UAV也可以装备OIRS来分裂和重新反射接收到的光信号,从而将光信号传输给更多UAV。为了简化分析和发现规律,本文仅分析在初始简单网络结构下UAV的通信,即只有主UAV装备了OIRS。在复杂网络下的UAV群OMC是这一简单网络的扩展。
2.1 用户接收信号
假设该系统包含一个基站、一个主UAV和N个从属UAV。基站向主UAV传输光信号。主UAV上的光学智能反射表面(OIRS)将入射光信号分裂并反射到N个从属UAV。这里的光信号分裂是通过OIRS准确重构入射光束的光场实现的。子光束的位置和能量分布可以通过OIRS自由调整。然后从属UAV n的接收信号可以表示为:
[r_{n}(t)=h_{n}eta _{o}mu _{n}s(t)+n_{r_{n}}=h_{s,o}h_{o,r_{n}}eta _{o}mu _{n}s(t)+n_{r_{n}}]
其中,(h_{n})表示从基站通过OIRS到从属UAV n的信道衰落,(eta_{0})是OIRS引入的功率衰减系数,(mu_{n})是OIRS分配给从属UAV n的功率分配系数,(s(t))是光信源发射的光信号。在此系统中,使用强度调制直接检测(IM/DD)与开关键控(OOK)调制,其中(s(t)=0)或(2P_{t}),(P_{t})是信源的发射光功率。(n_{r_{n}})是从属UAV n接收机的零均值高斯白噪声,其方差为(sigma_{n_{r_{n}}}^{2})。(h_{s,o})表示从源到OIRS的信道衰落,(h_{o,r_{n}})表示从OIRS到从属UAV n的信道衰落。在分析系统的信道衰落(h_{n})时,需要考虑OIRS的影响。
2.2 用于UAV通信的OIRS光束对准
当从属UAV位于(r_{x})、(r_{y})、(r_{z})位置时,OIRS需要调整每个镜面单元的旋转角度,以将光束偏转到用户处,从而实现光束控制。假设OIRS由(I×J)个镜面单元组成,第i行第j列的镜面单元中心坐标为((x_{ij}, y_{ij}, z_{ij}))。其法向量的原始方向向量(h_{ij})为((h_{x_{ij}}, h_{y_{ij}}, h_{z_{ij}}))。来自基站的信号光束经过一定距离到达主UAV上的OIRS。由于光束的发散角,此时OIRS接收到一个扩散的光斑。假设入射光束的方向向量s为((s_{x}, s_{y}, s_{z})),接收机中心的坐标为((r_{x}, r_{y}, r_{z}))。这里本系统使用镜面阵列(Mirror Array, MA)型OIRS,这种类型的OIRS被广泛应用且适合于光束聚焦和对准。下面将基于实际物理模型推导OIRS光束聚焦和对准的相关参数表达式。
如图2所示,展示了在UAV通信场景中OIRS光束聚焦和对准的示意图。从图2可以看出,基站的光束经由主UAV上的OIRS反射后,可以再次聚焦到从属UAV上。同时,当主UAV与从属UAV之间存在相对运动时,也可以使用OIRS来校准光束。
根据几何关系,可以推导出第i行第j列的镜面单元法向量在偏转后的方向向量(h_{ij}')为:
因此,可以推导出第i行第j列的镜面单元的偏转角( heta_{ij})为:
同时可以推导出法向量的旋转轴方向向量(l_{m})为:
最后可以推导出第i行第j列镜面单元的旋转矩阵(R_{ij})为:
基于推导出的式(4)和式(6),可以控制OIRS实现光束对准到从属UAV。最初到达主UAV的扩散光束再次被聚焦于从属UAV。对于多个UAV的光束分裂情况,需要进行OIRS的区域控制。本系统可以根据式(4)和式(6)的算法选择一些镜面单元指向某个特定的从属UAV。同样,其他镜面单元的输出光束可以指向其他从属UAV,从而实现光束的分裂。这种方法有效利用OIRS的单元独立控制特性,可以按需动态调整每个镜面单元的指向,使得OIRS不仅能对单一从属UAV进行精确的光束定向,也能同时服务于多个目标,从而拓展通信网络的覆盖范围。通过这种区域控制策略,系统能够灵活响应环境变化和UAV群的动态配置,优化整个UAV网络的通信效率和质量。这种技术在确保每个从属UAV都能接收到足够的信号强度的同时,还能最大化整个系统的功率分配和利用效率。
3 系统信道建模
尽管此系统针对的是UAV群体,但其本质仍然是一个带有激光源的OMC系统,符合OMC信道模型。系统信道衰落的主要影响因素包括指向误差、大气湍流和大气衰减。这些影响因素相互独立。因此,从属无人机n的信道衰落(h_{n})可以表示为:
其中,(h_{l_{n}})是由大气衰减引起的信道衰落,也称为路径损失;(h_{a_{n}})是由大气湍流引起的信道衰落;(h_{p_{n}})是由指向误差引起的信道衰落。接下来,将基于UAV群OMC的实际环境和物理模型,分别分析这个系统中的(h_{l_{n}})、(h_{a_{n}})和(h_{p_{n}})。
3.1 包含UAV相对位移的指向误差分析与OIRS光束校准
指向误差是指由于发射端的抖动等因素导致光束偏离接收机中心的现象,从而导致信号衰减。正如系统模型章节所提到的,在本系统中,需要使用OIRS来校准UAV之间的相对位移。然而,OIRS的光束对准仍然存在一定的误差,这将直接影响系统的指向误差。
假设OIRS的刷新间隔为(Delta t),从属UAV n相对于主UAV的移动速度为(v_{n})。则从属UAV n在OIRS刷新间隔内的位移可以表示为(d_{n}=v_{n} Delta t)。(d_{n})可以在接收端的x、y平面内分解为([d_{n_{x}}, d_{n_{y}}]),其中(d_{n_{x}}=v_{n_{x}} Delta t),(d_{n_{y}}=v_{n_{y}} Delta t)。为了将光束瞄准从属UAV n,OIRS输出光束的偏转角为( heta_{o}),该偏转角在接收平面上对应的偏转位移为(d_{o})。(d_{o})可以在接收端的x、y平面内分解为([d_{o_{x}}, d_{o_{y}}]),并且(d_{o_{x}}= heta_{o_{x}} l_{o,r_{n}}),(d_{o_{y}}= heta_{o_{y}} l_{o,r_{n}}),其中( heta_{o_{x}})和( heta_{o_{y}})分别是( heta_{o})在x、y平面上的映射。
同时,由于OIRS设置在UAV上,UAV的抖动也导致OIRS表面的抖动。OIRS表面的抖动角度可以假设为(varphi_{o})。发射端光束的抖动角度为(varphi_{t})。(varphi_{t})和(varphi_{o})都是符合高斯分布的随机变量。假设接收平面上的光束位移为(R=[R_{x}, R_{y}])。根据几何关系,可以推断出(R_{x})和(R_{y})都是符合非零均值高斯分布的随机变量。因此,接收平面上的光束位移(R=sqrt{R_{x}^{2}+R_{y}^{2}})符合贝克曼分布,其概率密度函数(Probability Density Function, PDF)可以表示为:
其中,(sigma_{varphi_{t_{s}}})表示发射端抖动的标准差,(sigma_{varphi_{o_{s}}})表示OIRS抖动的标准差,(I_{0}(cdot))是零阶的第1类修正贝塞尔函数。
根据文献[10],当具有高斯分布的光束照射到具有孔径半径a的光接收机时,由指向误差引起的信道衰落(h_{p_{n}})可以近似为:
[h_{p_{n}} approx A_{0} exp left(-frac{2 R^{2}}{omega_{z_{eq}}^{2}}
ight)]
其中,(A_{0})是在(R=0)时接收机收集到的功率的比例,(omega_{z_{eq}})是等效光束宽度。(A_{0}=[erf(z)]^{2})和(omega_{z_{eq}}^{2}=omega_{z}^{2} frac{sqrt{pi} erf(z)}{2 z exp (-z^{2})}),其中(z=sqrt{frac{pi}{2}} frac{a}{omega_{z}})是孔径半径与光束宽度的比率,(erf(x)=frac{2}{sqrt{pi}} int_{0}^{x} e^{-t^{2}} ~d t)是误差函数,(omega_{z})是光束腰半径,可以通过(omega_{z}=phi(l_{s,o}+l_{o,r_{n}}))近似计算,(phi)是光束的发散角。式(9)显示了接收效率与光束中心偏离接收机中心的关系。如果(frac{omega_{z}}{a}>6),式(9)中的近似非常精确[10]。将式(9)代入式(8),可以推导出(h_{p_{n}})的PDF为:
3.2 大气湍流分析
由于本系统中UAV用户和OIRS均位于高海拔,信道湍流被建模为中到强湍流,这更符合现实情况[5,6,10,11]。对于中到强湍流条件,大气衰落(h_{a_{n}})的PDF可以表示为[10,11]:
其中,(Gamma(cdot))是伽马函数,而(K_{alpha_{g}-�eta_{g}}(cdot))是第二类修正贝塞尔函数,其阶数为(alpha_{g}-�eta_{g})。参数(alpha_{g})和(�eta_{g})分别与小尺度和大尺度湍流有关。
3.3 大气衰减分析
该系统使用波长为1550 nm的光信号进行通信,该波长在大气中的衰减较少[11,12]。然而,在特殊天气条件下,光信号的传输也会受到影响。在能见度为1 km的雾霾天气下,波长1550 nm处的衰减约为3 dB/km。在本系统中,假设天气条件的变化相对缓慢,这会带来大尺度的信道增益。由大气衰减引起的信道衰落(h_{l_{n}})可以表示为:
[h_{l_{n}}=10^{-frac{LTH cdot (l_{s,o}+l_{o,r_{n}})}{10}}]
其中,(LTH)表示在当前天气条件下光信道每公里的大气衰减,单位为dB/km,(l_{s,o})表示从光源到OIRS的距离,(l_{o,r_{n}})表示从OIRS到从属UAV n的距离。
3.4 系统信道衰落分析
由于(h_{l_{n}})是大尺度信道衰落,系统信道衰落(h_{n})的PDF可以表示为:
将式(10)和式(11)代入式(13),可以根据文献[13]中的有限级数近似,推导出在中到强湍流条件下(h_{n})的PDF的近似公式为:
4 系统性能分析
由于在此系统中使用强度调制/直接检测(IM/DD)与开关键控(OOK)调制,系统的平均BER可以表示为[14,15]:
5 系统仿真
在本节中,将解析结果与仿真结果进行了详细的比较。仿真基于UAV和OIRS的物理模型来搭建。在对于系统信道的仿真中,添加了独立的发射机和UAV抖动随机变量以及UAV随机相对位移变量,确保与实际系统高度吻合。在仿真中,发射端模拟了(10^{8})个独立的光信号,并在接收端使用蒙特卡罗方法统计接收到的光信号数量。然后,根据接收到的光信号数量与发送的光信号数量的比例来计算系统BER。本系统的参数如表1所示:
表1 系统参数
| 参数 | 值 |
| 光波长(λ) | 1550 nm |
| 接收机的噪声方差((sigma_{n_{r_{n}}}^{2})) | (10^{-6}) |
| 发射端发散角度((phi)) | 6 mrad |
| 发射端抖动标准差((sigma_{varphi_{t_{s}}})) | (2×10^{-3}) |
| 从发射端到OIRS的链路距离((l_{s,o})) | 100 m |
| 大气衰减系数((iota_{n})) | 0.9 |
| OIRS到从属UAV n的链路距离((l_{o,r_{n}})) | 50 m |
| 接收机直径(2a) | 20 cm |
在仿真中,主要比较了不同的OIRS抖动标准差((sigma_{varphi_{o_{s}}}))、湍流系数((sigma_{R}))、无人机光束校准精度((e_{n}))以及与主UAV的功率分配系数((mu_{n}))下系统的性能。其中,OIRS抖动标准差((sigma_{varphi_{o_{s}}}))和湍流系数((sigma_{R}))的固有参数对系统性能的影响较大。但是由于OIRS抖动在OIRS被充分固定后,难以进一步降低,因此系统设计还是需要将重心倾向易改变的光束对准精度。与OMC信道参数对系统性能的影响相比,本系统中OIRS光束校准((e_{n}))的影响也非常大。正如3.1节中所定义的,(e_{n}=sqrt{(v_{n_{x}} Delta t- heta_{o_{x}} l_{o,r_{n}})^{2}+(v_{n_{y}} Delta t- heta_{o_{y}} l_{o,r_{n}})^{2}}),其等于无人机相对运动速度与OIRS光束偏转速度的差值。可以观察到,在缺乏OIRS光束对准的UAV系统中,由于无人机的相对运动导致的接收光束偏移,系统性能将显著下降,这对通信性能的影响比恶劣天气的影响更大。同时,当(e_{n})控制在约0.02时,从属UAV的性能相对较好。
(mu_{n})指的是主UAV的功率分配系数。当(mu_{n}=1)时,表明主UAV只向1个从属UAV分配光信号。同时还模拟了(mu_{n}=0.5)和(mu_{n}=0.3)的情况,这分别对应于主UAV将功率分配给两个和3个从属UAV。从图3可以看出,每增加1个从属UAV,性能都会显著下降。因此,本系统需要根据实际情况确定每个OIRS负责的从属UAV数量。在这种模拟条件下,每个主UAV负责3个从属UAV最为合适。当有超过3个从属UAV时,每个从属UAV都将难以维持通信。
6 结束语
本文提出一种OIRS辅助的UAV群分布式OMC系统,利用OIRS的光束反射和偏转能力,使原本只能指向单个UAV的OMC链路得以扩展到一组UAV。同时,得益于OIRS的重新聚焦能力,位于后端的UAV仍然能够接收到高度集中的光束。通过性能分析和仿真发现,在使用OIRS进行信号反射和传输时,从属UAV仍然可以保持良好的通信性能。OIRS的光束对准能力也可以提升系统性能。然而,由于功率限制,每增加1个从属UAV都会导致性能显著下降。因此,需要根据实际情况确定每个OIRS负责的从属UAV数量。未来工作将进一步设计和优化OIRS辅助的UAV-OMC网络架构。
参考文献
[1] 张在琛, 江浩. 智能超表面使能无人机高能效通信信道建模与传输机理分析[J]. 电子学报, 2023, 51(10): 2623–2634.
[2] 朱秋明, 倪浩然, 华博宇, 等. 无人机毫米波信道测量与建模研究综述[J]. 移动通信, 2022, 46(12): 2–11.
[3] DABIRI M T, SADOUGH S M S, ANSARI I S. Tractable optical channel modeling between UAVs[J]. IEEE Transactions on Vehicular Technology, 2019, 68(12): 11543–11550.
[4] ZHANG Zaichen, DANG Jian, WU Liang, et al. Optical mobile communications: Principles, implementation, and performance analysis[J]. IEEE Transactions on Vehicular Technology, 2019, 68(1): 471–482.
[5] NAJAFI M, SCHMAUSS B, SCHOBER R. Intelligent reflecting surfaces for free space optical communication systems[J]. IEEE Transactions on Communications, 2021, 69(9): 6134–6151.
[6] JAMALI V, AJAM H, NAJAFI M, et al. Intelligent reflecting surface assisted free-space optical communications[J]. IEEE Communications Magazine, 2021, 59(10): 57–63.
[7] WANG Haibo, ZHANG Zaichen, ZHU Bingcheng, et al. Approaches to array-type optical IRSs: Schemes and comparative analysis[J]. Journal of Lightwave Technology, 2022, 40(12): 3576–3591.
[8] MING Rui, ZHOU Zhiyan, LUO Xiwen, et al. Optical tracking system for multi-UAV clustering[J]. IEEE Sensors Journal, 2021, 21(17): 19382–19394.
[9] DABIRI M T, REZAEE M, MOHAMMADI L, et al. Modulating retroreflector based free space optical link for UAV-to-ground communications[J]. IEEE Transactions on Wireless Communications, 2022, 21(10): 8631–8645.
[10] NATH S, SENGAR S, SHRIVASTAVA S K, et al. Impact of atmospheric turbulence, pointing error, and traffic pattern on the performance of cognitive hybrid FSO/RF system[J]. IEEE Transactions on Cognitive Communications and Networking, 2019, 5(4): 1194–1207.
[11] SANDALIDIS H G, TSIFTSIS T A, KARAGIANNIDIS G K, et al. BER performance of FSO links over strong atmospheric turbulence channels with pointing errors[J]. IEEE Communications Letters, 2008, 12(1): 44–46.
[12] IJAZ M, GHASSEMLOOY Z, PEREZ J, et al. Enhancing the atmospheric visibility and fog attenuation using a controlled FSO channel[J]. IEEE Photonics Technology Letters, 2013, 25(13): 1262–1265.
[13] WANG Zhengdao, GIANNAKIS G B. A simple and general parameterization quantifying performance in fading channels[J]. IEEE Transactions on Communications, 2003, 51(8): 1389–1398.
[14] SUN Shiyuan, WANG Tengjiao, YANG Fang, et al. Intelligent reflecting surface-aided visible light communications: Potentials and challenges[J]. IEEE Vehicular Technology Magazine, 2022, 17(1): 47–56.
[15] AJAM H, NAJAFI M, JAMALI V, et al. Modeling and design of IRS-assisted multilink FSO systems[J]. IEEE Transactions on Communications, 2022, 70(5): 3333–3349.