摘要:摘要:为了解决传统雷达在低空小型无人机探测中探测精度受限等不足,提出一种基于深度学习的低空小型无人机探测系统。系统采用三层架构设计:感知层利用摄像头采集实时图像数据;硬件
摘要:为了解决传统雷达在低空小型无人机探测中探测精度受限等不足,提出一种基于深度学习的低空小型无人机探测系统。系统采用三层架构设计:感知层利用摄像头采集实时图像数据;硬件层基于边缘计算技术,使用Jetson Nano作为硬件平台,结合决策层中的目标检测算法,实现了高效且精准的预警功能。在算法选择上,通过实验对比分析了主流目标检测算法,选择最优算法YOLOv8,并对其进行优化。实验结果表明,优化后的算法各项指标均有显著提升,验证了该方案的有效性。
关键词:无人机;深度学习;边缘计算;Jetson Nano;YOLOv8
论文《基于深度学习的无人机探测系统搭建与优化》发表在《电脑与电信》,版权归《电脑与电信》所有。本文来自网络平台,仅供参考。
1 引言
近年来,小型无人机的广泛应用推动了产业界的技术革新。然而,这些无人机在为社会提供便利的同时,也对公共安全构成了威胁。传统雷达系统在低空小型无人机探测方面表现出显著不足。一方面,低空飞行的无人机具有较小的雷达反射截面积,易被传统雷达忽略。另一方面,复杂的地面反射和背景干扰使得传统雷达的探测精度受到限制。
为应对上述挑战,本文提出一种基于深度学习的低空小型无人机探测系统,该系统以Jetson Nano为智能硬件平台,结合深度学习中的目标检测算法,充分利用深度学习的高效性与边缘计算的低延时特性,实现对低空无人机的实时精准识别,同时有效降低了使用成本。实验结果表明,该系统在准确率和识别速度方面均表现出显著优势,为低空小型无人机探测提供一种灵活、高效且经济的解决方案。
2 系统结构框架
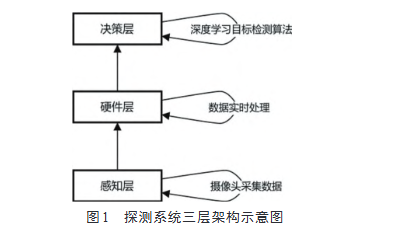
系统采用三层架构设计,包括感知层、硬件层和决策层。
决策层:深度学习目标检测算法
硬件层:数据实时处理
感知层:摄像头采集数据
感知层包含摄像头,负责实时捕获低空环境的视频流,为后续的数据分析与目标检测提供基础支持。
硬件层基于Jetson Nano边缘计算平台,执行模型推理任务,实现低延迟和高实时性的数据处理功能。
决策层依托硬件层,利用优化后的深度学习目标检测算法,对感知层输入的实时数据进行处理并分析结果,从而实现低空无人机探测功能。三层架构设计具有模块化、经济性和高可靠性等优势。各层功能分工明确,通过高效协作实现了对低空小型无人机的高效、低成本探测。
2.1 感知层设计
感知层是系统的输入模块,主要负责环境数据的采集。该层选用高分辨率工业摄像头作为核心设备,其具备优异的抗干扰能力和高帧率性能,能够在复杂的光照条件下稳定运行。摄像头安装在固定位置,覆盖低空飞行区域,用以全面捕获无人机的飞行轨迹。为了提高数据处理的效率,感知层可对实时视频流处理,将其转换为图像帧并传输至硬件层。高质量的图像数据为后续的目标检测和分析提供了坚实基础。
2.2 硬件层设计
硬件层基于NVIDIA Jetson Nano边缘计算平台,负责执行深度学习模型推理任务。Jetson Nano集成了NVIDIA Maxwell GPU和Cortex-A57 CPU,具备低功耗和高性能的特点,能够高效运行深度学习算法。该平台使用Ubuntu 18.04操作系统,配套安装了TensorRT、CUDA 和cuDNN 等工具库,为模型推理提供了强大的基础类库支持。
硬件层通过边缘计算技术,实现了低延迟的数据处理能力,为决策层的目标检测和预警功能提供了可靠的硬件基础。此外,模块化的设计使得系统具备良好的扩展性和适应性。
2.3 决策层设计
决策层采用优化后的YOLOv8深度学习目标检测算法,专门针对低空小型无人机的探测需求进行优化。优化后的版本在复杂环境中表现出卓越的鲁棒性,能够在保持检测速度的同时实现高精度目标检测。
在探测到疑似无人机目标时,决策层会立即触发系统报警机制,实现对潜在威胁的实时预警功能。优化后的YOLOv8不仅提高了目标检测的准确率,同时显著增强了泛化性。
完成优化设计后,系统成功实现了低空小型无人机的精准探测与高效预警。
3 算法优化
本文通过一系列优化策略对YOLOv8进行了针对性改进,包括数据增强以提升模型的泛化能力,Focal Loss优化以缓解正负样本不平衡问题,Anchor Box优化以更好地适配小目标检测需求,以及模型剪枝技术以减小模型规模并提升推理效率。
3.1 数据增强优化及评估
在模型训练过程中,数据增强是提高模型泛化能力的重要手段。采用旋转、裁剪、翻转、缩放等技术,生成多样化的训练样本。通过随机旋转图像一定角度,可以增强模型对不同角度无人机的检测能力;随机裁剪图像部分区域,使模型能适应不同位置和大小的无人机;水平和垂直翻转图像,增加数据集的多样性和模型的泛化能力;随机缩放图像,改变目标的大小,以提高模型对不同尺度目标的检测能力。
数据多样化策略可以进一步提升模型的鲁棒性。通过添加噪声、颜色变换、亮度调整等手段,使得模型在复杂背景和光照条件下仍能准确识别无人机。例如,添加高斯噪声可以模拟图像中的干扰,颜色变换和亮度调整可以模拟不同天气条件和光照变化。这些策略能使模型在训练过程中学到更多的特征,增强其在不同环境下的检测能力。
由于需要在保持YOLOv8x预测精度的基础上,尽可能使其接近YOLOv8n的推理速度,因此,优化后的模型需要与原始性能的YOLOv8x 和YOLOv8n 进行数据对比。
表1 经过数据增强优化后的推理速度及准确度与原始算法的数据对比
| 算法 | mAP | Recall | F1 Score | mAP @0.5:0.95 | FPS(每秒处理帧数) | MU(内存占用) | TNR(真反例率) | FPR(假正例率) | FNR(假反例率) | IoU(交并比) | CE(交叉熵损失) |
| 原始YOLOv8x | 0.87 | 0.85 | 0.86 | 0.78 | 90 | 3.00 | 0.97 | 0.03 | 0.15 | 0.17 | 0.01 |
| 原始YOLOv8n | 0.81 | 0.80 | 0.81 | 0.70 | 150 | 1.20 | 0.95 | 0.04 | 0.18 | 0.20 | 0.02 |
| 数据增强优化后YOLOv8 | 0.89 | 0.87 | 0.88 | 0.80 | 88 | 3.10 | 0.98 | 0.02 | 0.13 | 0.15 | 0.01 |
从实验结果可以看出,经过数据增强后,模型在准确率、召回率和F1分数等方面均略有提升,说明数据增强策略对模型性能提升具有一定的效果。尽管优化效果并不明显,但模型在复杂背景和不同光照条件下的鲁棒性得到了增强,进一步验证了数据增强技术在低空小型无人机检测任务中的重要性。
3.2 Focal Loss优化及评估
在低空小型无人机检测任务中,由于检测环境的复杂性,常会遇到类间不平衡的问题,即背景样本数量远远多于目标样本。这种情况下,传统的交叉熵损失容易受到大量简单背景样本的影响,导致模型训练效果不佳。
为解决这一问题,本文引入Focal Loss来优化YOLOv8模型。Focal Loss是为了解决类间不平衡问题而提出的一种损失函数,它在标准交叉熵损失的基础上引入了一个调节因子,用来降低简单样本的损失贡献,并增加难以分类样本的损失权重。
公式:$FLleft(p_{r}
ight)=-alpha_{r}left(1-p_{r}
ight)^{gamma} log left(p_{r}
ight)$
其中,$p_{r}$ 是预测为正类的概率;$alpha_t$ 是平衡因子,用于平衡正负样本比例。$gamma$ 是调节因子,用于调整难易样本权重,一般取值为2,本次实验使用该值。
表2 经过Focal Loss优化后的推理速度及准确度与原始算法的数据对比
| 算法 | mAP | Recall | F1 Score | mAP @0.5:0.95 | FPS | MU | TNR | FPR | FNR | IoU | CE |
| 原始YOLOv8x | 0.87 | 0.85 | 0.86 | 0.78 | 90 | 3.00 | 0.97 | 0.03 | 0.15 | 0.17 | 0.01 |
| 原始YOLOv8n | 0.81 | 0.80 | 0.81 | 0.70 | 150 | 1.20 | 0.95 | 0.04 | 0.18 | 0.20 | 0.02 |
| Focal Loss优化后YOLOv8 | 0.89 | 0.88 | 0.88 | 0.81 | 88 | 3.10 | 0.98 | 0.02 | 0.13 | 0.16 | 0.01 |
由上表实验结果可以看出,使用Focal Loss优化后的模型,在准确率、召回率和F1分数均有所提升,但FPS出现明显的下降。这是因为损失计算的复杂度增加,带来额外的计算开销。以上实验数据表明,本任务中并不适合使用Focal Loss优化。
3.3 Anchor Box优化及评估
Anchor Box即为锚框,是预先定义的一组矩形框。其目的是提供一组参考框,以便检测器在训练和推理过程中可以更准确地定位和分类目标。每个锚框有其固定的宽高比和尺寸。在训练过程中,模型会学习如何调整这些锚框,使其与实际目标框更加吻合。在低空小型无人机检测任务中,目标的尺寸和形状可能会有很大的变化,默认的锚框配置可能无法很好地适应这些变化,从而影响模型的检测性能。
具体优化步骤如下:
1. 统计目标分布:对训练数据集中的目标框进行统计分析,确定目标框的尺寸和宽高比分布。
2. K-means聚类:使用K-means聚类算法,对统计得到的目标框进行聚类,以确定最优的Anchor Box尺寸和比例。
3. 更新Anchor Box配置:将聚类得到的Anchor Box尺寸和比例更新到模型配置中,并重新训练模型。
表3 经过Anchor Box优化后的推理速度及准确度与原始算法的数据对比
| 算法 | mAP | Recall | F1 Score | mAP @0.5:0.95 | FPS | MU | TNR | FPR | FNR | IoU | CE |
| 原始YOLOv8x | 0.87 | 0.85 | 0.86 | 0.78 | 90 | 3.00 | 0.97 | 0.03 | 0.15 | 0.17 | 0.01 |
| 原始YOLOv8n | 0.81 | 0.80 | 0.81 | 0.70 | 150 | 1.20 | 0.95 | 0.04 | 0.18 | 0.20 | 0.02 |
| Anchor Box优化后YOLOv8 | 0.90 | 0.88 | 0.89 | 0.82 | 89 | 3.05 | 0.98 | 0.02 | 0.13 | 0.16 | 0.01 |
实验结果表明,使用Anchor Box优化后,尽管FPS值略有下降,但准确率、召回率和F1分数均有所提升,取得了不错的成绩。并且在实验中发现,在处理多尺度目标时,使用Anchor Box优化后的模型表现更为优异。
3.4 模型剪枝优化及评估
为了进一步提高YOLOv8模型在低资源设备上的运行效率,同时保持其高精度,本文使用了模型剪枝优化技术。模型剪枝可以通过减少模型参数数量,降低计算量和内存占用,从而加快推理速度并降低资源需求。
在对YOLOv8模型应用模型剪枝过程中,L1范数被用作评估权重重要性的一种方法。L1范数是一个向量中所有元素绝对值的总和。在深度学习中,它用于衡量模型参数的重要性。
公式:$| W| _{1}=sum_{i} sum_{j}left|W_{i, j}
ight|$
其中,$W_{ij}$ 是矩阵中第i行第j列的元素。在模型剪枝过程中,L1范数用于评估每个卷积核或通道的权重重要性,即对于每个卷积核或通道,计算其权重的L1范数,L1范数较小的权重表示该卷积核或通道对模型的贡献较小,因此可以考虑剪除。
本文采用结构化剪枝方法,具体步骤如下:
1. 预训练模型:首先在数据集上训练一个模型。
2. 评估权重重要性:使用L1范数,评估每个卷积核或通道的重要性。
3. 剪枝策略:通过计算每个卷积核或通道的L1范数,将每个卷积核的L1范数从高到低排序。同时设定比例为40%,剪掉范数最低的部分。
4. 微调模型:对剪枝后的模型进行微调,以恢复性能损失。
5. 评估模型:比较剪枝前后模型的性能指标和资源消耗。
本文使用YOLO-Silm自动化剪枝工具,该工具能够简化YOLO系列模型的结构化剪枝过程。
表4 YOLO-Silm参数设定表
| 参数名称 | 设定值 | 参数作用描述 |
| pruning_ratio | 0.4 | 剪掉的通道数量,0.4表示剪掉40%的通道数 |
| criterion | l1_norm | 剪枝指标,l1_norm即为使用L1范式 |
| layer_wise | False | 每层是否单独设置剪枝比例,False表示全局统一剪枝 |
| min_channels | 32 | 每层保留的最小通道数,以避免剪枝过多导致模型失效 |
| fine_tune_epochs | 20 | 微调的轮数,用于恢复剪枝后模型性能 |
| learning_rate | 1e-4 | 微调时的学习率,也就是0.0001 |
| optimizer | SGD | 优化器类型,SGD为随机梯度下降 |
| eval_metric | mAP@0.5:0.95 | 性能评估指标 |
| batch_size | 64 | 推理时的批量大小,batch_size越大泛化能力越好 |
表5 经过模型剪枝优化后的推理速度及准确度与原始算法的数据对比
| 算法 | mAP | Recall | F1 Score | mAP @0.5:0.95 | FPS | MU | TNR | FPR | FNR | IoU | CE |
| 原始YOLOv8x | 0.87 | 0.85 | 0.86 | 0.78 | 90 | 3.00 | 0.97 | 0.03 | 0.15 | 0.17 | 0.01 |
| 原始YOLOv8n | 0.81 | 0.80 | 0.81 | 0.70 | 150 | 1.20 | 0.95 | 0.04 | 0.18 | 0.20 | 0.02 |
| 模型剪枝优化后YOLOv8 | 0.85 | 0.84 | 0.83 | 0.75 | 120 | 2.00 | 0.95 | 0.05 | 0.18 | 0.20 | 0.02 |
从表中数据能够看出,使用模型剪枝优化技术能够显著提升模型推理速度,其FPS增加至120,接近YOLOv8n的150,对于Jetson Nano来说可以接受。尽管性能指标有所下降,mAP值由0.87下降至0.85,但相比于YOLOv8n的0.81还是高出不少。
为了进一步恢复性能,本文在剪枝优化的基础上,对模型继续使用数据增强和Anchor Box优化。
表6 剪枝优化后继续使用数据增强和Anchor Box优化后的推理速度及准确度与原始算法的数据对比
| 算法 | mAP | Recall | F1 Score | mAP @0.5:0.95 | FPS | MU | TNR | FPR | FNR | IoU | CE |
| 原始YOLOv8x | 0.87 | 0.85 | 0.86 | 0.78 | 90 | 3.00 | 0.97 | 0.03 | 0.15 | 0.17 | 0.01 |
| 原始YOLOv8n | 0.81 | 0.80 | 0.81 | 0.70 | 150 | 1.20 | 0.95 | 0.04 | 0.18 | 0.20 | 0.02 |
| 仅模型剪枝优化YOLOv8 | 0.85 | 0.84 | 0.83 | 0.75 | 120 | 2.00 | 0.95 | 0.05 | 0.18 | 0.20 | 0.02 |
| 剪枝+数据增强+Anchor Box优化YOLOv8 | 0.86 | 0.85 | 0.84 | 0.77 | 120 | 2.50 | 0.96 | 0.04 | 0.19 | 0.17 | 0.01 |
通过上述实验数据分析可以得出,进一步优化后的模型在准确率、召回率和F1分数等核心性能指标上均表现出显著提升,已经接近于YOLOv8x模型的水平。此外,模型的推理速度也同样得到了显著改善,几乎达到了YOLOv8n的性能水平。尤其是在实际部署环境中,优化后的模型能够以更快的速度和较低的硬件资源消耗实现高精度的无人机检测。从整体实验数据来看,验证了本文优化策略的有效性。
实际测试选取了两类典型场景:一是飞行高度约60米、存在树枝遮挡的复杂背景场景;二是逆光昏暗场景。优化模型在两种环境下均可精准识别四旋翼无人机,识别置信度分别为0.74、0.76,证明模型在复杂背景与弱光条件下具备良好的识别性能与鲁棒性。
4 总结与展望
本文针对传统雷达系统在低空小型无人机探测中的不足,提出了一种基于深度学习的无人机探测系统。系统采用了三层架构:即感知层、硬件层和决策层。同时,在深度学习算法模型上重点实施了数据增强、Anchor Box优化以及模型剪枝等优化措施,实现了对无人机高精度和高效率的探测能力。实验结果表明,优化后的YOLOv8在探测精度、反应速度和探测系统的全面性能指标上均有显著提升,为未来系统的进一步优化提供了坚实的基础。
尽管本文通过多种优化策略显著提升了YOLOv8的性能,但仍存在一些不足和改进方向。首先,数据集可能不够全面,未能覆盖所有可能的低空小型无人机场景和条件,导致模型的泛化能力受到限制。其次,虽然模型剪枝减少了内存占用并提高了推理速度,但部分重要特征可能在剪枝过程中被误剪,导致模型性能下降。
未来的改进方向有:收集更多不同场景和条件下的低空小型无人机数据,包括不同光照、天气和背景条件下的数据,以提升模型的泛化能力和适应性。进一步研究和优化剪枝策略,采用敏感性分析,确保在保留模型重要特征的同时,最大限度地减少冗余计算,提高模型在复杂场景中的检测能力。
参考文献
[1] 汤新民,顾俊伟,刘冰,等.低空监视技术及其发展趋势综述[J].南京航空航天大学学报,2024, 56(6):973-993.
[2] 邱小剑,骆博雅,付珍,等.国内外反无人机技术发展综述[J].战术导弹技术,2024(5):63-73+98.
[3] 张霞峰,柳畅,单业奇,等.基于视觉传感器的无人驾驶机器人控制系统设计与研究[J].机电工程技术,2024, 53(12):146-148+186.
[4] Jeong E,Kim J,Ha S,et al.TensorRT-Based Framework and Optimization Methodology for Deep Learning Inference on Jetson Boards [J].ACM Transactions on Embedded Computing Systems,2022,21(5):51-76.
[5] 张光钱,周广利,黄飞,等.面向3D目标检测的多模态生成式图像数据增强的研究[J].重庆理工大学学报(自然科学),2024,38 (10):13-20.
[6] 曲坤,王震龙,刘志锋.基于多表征学习的交叉熵集成图像分类方法[J].计算机工程,2024,50(10):322-333.
[7] 孙仕棚,兰时勇.考虑注意力的无锚框孪生网络目标跟踪算法[J].计算机应用与软件,2024, 41(12):268-274.
[8] 黄海新,徐成龙.大语言模型的剪枝算法综述[J].通信与信息技术,2025(1):95-99.
[9] Jani,M.,Alhassan,et al.Model Compression Methods for YOLOv5:A Review[J].arXiv preprint. 2023, arXiv:2307. 11904.
[10] Betti A.YOLO-S:A Lightweight and Accurate YOLO-like Network for Small Target Detection in Aerial Imagery[J].Sensors,23(4):1865.