摘要:东南大学移动通信国家重点实验室、紫金山实验室王海卜团队在《 电子与信息学报 》发表论文《 光学智能反射表面辅助的UAV群分布式光移动通信 》。该研究针对传统无人机光移动通信(UAV-O
东南大学移动通信国家重点实验室、紫金山实验室王海卜团队在《电子与信息学报》发表论文《光学智能反射表面辅助的UAV群分布式光移动通信》。该研究针对传统无人机光移动通信(UAV-OMC)难以支持多无人机通信的痛点,提出基于光学智能反射表面(OIRS)的分布式通信系统,在保留高能效与高速度优势的同时,实现了分布式UAV群的稳定通信,为无人机集群通信技术突破提供了重要支撑。
随着无人机技术在高空基站、三维测绘等领域的广泛应用,对通信速率和带宽的需求持续攀升。光移动通信因具备高能效、宽带宽特性成为优选方案,但传统点对点传输模式无法满足多无人机协同作业的实时通信需求,而射频通信方案又存在能效和速率不足的问题,行业亟需新型通信技术解决方案。
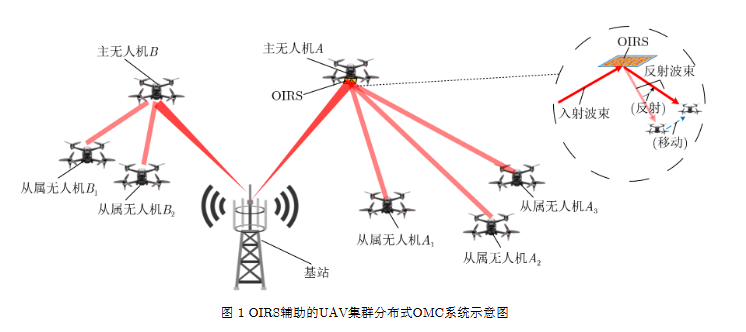
为破解这一困境,研究团队创新性地将OIRS技术融入UAV群通信系统,通过在特定主无人机上部署OIRS设备,利用其光束偏转、分裂与重构能力,将单一节点的光信号扩散至多个从属无人机,形成以OIRS为中心的分区通信架构。每个OIRS不仅承担信号转发功能,还能通过精准的光束对准与聚焦控制,确保每个无人机节点都能接收稳定信号。
系统设计中,团队充分考虑实际应用场景,构建了包含UAV相对运动、设备抖动、高空强湍流等现实因素的数学模型,推导出误比特率(BER)和渐进中断概率的闭式表达式,为系统性能优化提供了理论依据。通过镜面单元独立控制算法,OIRS可动态调整光束方向,实现多目标同时服务,灵活适配UAV群的动态配置。
仿真测试显示,该系统在高信噪比条件下理论值与实测值高度吻合,光束对准精度对通信性能的影响尤为关键,其作用超过恶劣天气的干扰;当光束校准误差控制在0.02以内时,系统性能达到最优。此外,功率分配测试表明,每个主无人机搭配3个从属无人机为最优配置,过多从属节点会导致性能显著下降。
该研究成功解决了UAV群光通信的多节点接入难题,其提出的系统架构与优化方案不仅适用于无人机集群,还可为6G光移动通信系统设计提供参考,在智能巡检、应急通信等领域具有广阔应用前景。未来团队将进一步优化网络架构,推动技术落地转化。
声明:
①文献来自知网、维普、万方等检索数据库,说明本文献已经发表见刊,恭喜作者.
②如果您是作者且不想本平台展示文献信息,可联系学术顾问予以删除.