摘要:针对整垛袋装物料装载过程中装载效率低、托盘回收率不足的问题,设计了一种集物料装载与托盘回收功能于一体的新型物流装载设备整垛袋装物料旋转式推进装载装置。阐述了该装置的总体
针对整垛袋装物料装载过程中装载效率低、托盘回收率不足的问题,设计了一种集物料装载与托盘回收功能于一体的新型物流装载设备——整垛袋装物料旋转式推进装载装置。阐述了该装置的总体方案设计、工作原理及受力特性,分析了其3种主要工况,并通过静力学仿真获得各工况下抓取部件的力学响应;开展整垛袋装物料装载试验,验证装置的性能与可靠性。结果表明:3种工况下抓取部件的最大变形量分别为13.26 mm、20.22 mm、24.95 mm,最大等效应力分别为275.36 MPa、306.42 MPa、323.56 MPa,均小于材料许用应力(360 MPa);装载高度为1 m和1.5 m时,装置完成物料装载的最短时间分别为47.5 s和57.1 s,与传统叉车相比,可节约装载成本57.5%,提高装载效率11.9%。该装置功能完整、结构安全可靠,能高效完成物料装载与托盘回收工作,为现代化物流装载设备升级提供了技术支撑。
关键词:装载装置;整垛袋装物料装载;托盘回收;静力学仿真
论文《整垛袋装物料装载装置的设计与试验》发表在《石河子大学学报(自然科学版)》,版权归《石河子大学学报(自然科学版)》所有。本文来自网络平台,仅供参考。
一、引言
物流业作为国民经济的基础性、战略性产业,其发展质量与效率直接影响经济增长与社会发展。装载机械作为物流企业的核心设备,其自动化程度、装载效率和运营成本是行业研发的核心评估指标。随着制造业自动化水平的提升,物流行业对装载设备的高效性、智能化提出了更高要求,研发新型装载设备以降低成本、提高效率成为必然趋势。
现有装载装置虽在单一功能(如物料装载、码垛)上自动化程度较高,但普遍存在局限性:部分装置智能化与效率不足,难以满足当前物流需求;部分适配特定场景但无法实现托盘回收;多数研发仅聚焦装载效率,忽视了装载后的托盘回收问题,导致托盘利用率低,增加了物流成本。针对这一现状,本文设计了集物料装载与托盘回收功能于一体的旋转式推进装载装置,通过静力学分析验证结构安全性,并通过试验测试其实际作业性能,为样机试制与后期优化提供理论支撑。
二、装载装置方案设计与原理分析
(一)总体方案设计
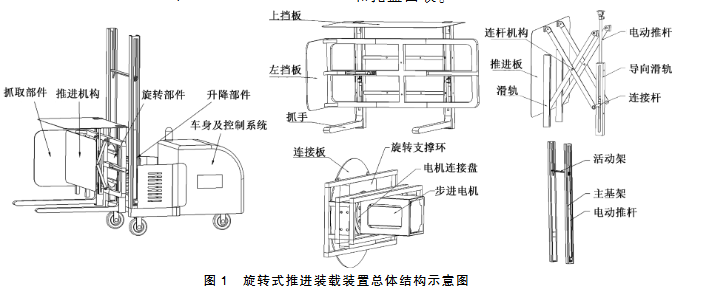
该装置由抓取部件、推进机构、旋转部件、升降部件及车身与电控系统5部分铰接组成,以蓄电池为动力源,通过电控系统控制电动推杆伸缩和步进电机旋转,实现抓取、旋转、升降、推进等系列动作,最终完成物料装载与托盘回收一体化作业。
(二)工作原理与过程
1. 抓取工作:控制抓取部件电动推杆运动,调整抓手位置,叉入托盘双孔并夹紧整垛袋装物料,完成包裹抓取。
2. 旋转工作:升降部件带动抓取的物料升高至预设装载高度,旋转部件步进电机启动,完成180°旋转,实现物料与托盘位置调位。
3. 推进工作:装置移动至装载区域,推进机构电动推杆伸缩,带动推进板推出,完成整垛袋装物料装载。
4. 回收工作:物料装载完成后,旋转部件反向旋转180°使托盘回位,调整抓手高度后,推进机构再次动作,将托盘推送至回收区域,完成托盘回收。
三、装载工作受载分析
(一)受力特性与工况划分
物料装载过程中,装置受力集中于抓取部件,且随旋转部件运动呈现周期性变化,依次作用于抓手、左挡板和上挡板,对应3种核心工况:
- 工况1:整垛袋装物料自重完全作用于抓手上;
- 工况2:整垛袋装物料自重完全作用于左挡板上;
- 工况3:整垛袋装物料自重完全作用于上挡板上。
(二)受力计算
装置设计最大装载质量为600 kg(物料自重G=6 kN),抓取部件自重50 kg(0.5 kN),旋转部件自重50 kg(0.5 kN)。基于静力学模型推导各部件受力,关键计算结果如下:
- 抓手、左挡板、上挡板的受力均为6 kN;
- 旋转部件受力F_xz=6.5 kN;
- 升降部件受力F_sJ=7 kN。
四、抓取部件静力学分析
(一)模型与参数设置
将SolidWorks2020建立的三维模型导入Ansys Workbench 2021R1,抓取部件材料选用合金钢20Cr(弹性模量2.06×10⁵ MPa,泊松比0.3,密度7850 kg/m³,屈服极限540 MPa)。采用绑定接触(焊接处)与摩擦接触(其他部位,摩擦系数0.2),划分四面体网格,关键部位网格加密至5 mm。
(二)仿真结果分析
1. 工况1(载荷作用于抓手):最大变形量13.26 mm(抓手尖端),最大等效应力275.36 MPa(抓取部件与旋转部件圆孔连接处),均小于许用应力。
2. 工况2(载荷作用于左挡板):最大变形量20.22 mm(左挡板顶端),最大等效应力306.42 MPa(左挡板与基架连接处),满足安全要求。
3. 工况3(载荷作用于上挡板):最大变形量24.95 mm(上挡板顶端),最大等效应力323.56 MPa(上挡板与基架连接处),未超过材料强度极限。
仿真结果表明,装置关键部件的危险区域主要集中在部件连接处与结构突变处,整体结构变形与应力均在许用范围内,结构设计安全合理。
五、装载装置整垛袋装物料装载试验
(一)试验设计
试验在石河子大学机械电气工程学院实训中心开展,以装载高度(1 m、1.5 m)、袋装物料数量(4~12袋)、物料总重(160~480 kg)为试验因素,以完成装载与托盘回收的总时间为评价指标,设计18组试验,每组重复5次取平均值。同时与传统合力叉车(最大承载3 t)进行对比,分析装置的效率与成本优势。
(二)试验过程与评价指标
装置按“抓取-升起-旋转-装载-托盘回位-回收”流程作业,记录各环节时间(抓取时间T₁、转移时间T₂、装载时间T₃、托盘转移时间T₄、回收时间T₅),总时间T=T₁+T₂+T₃+T₄+T₅。装载成本包括人工费用(按当地薪资25元/h计算)与设备使用成本(单次充电7度,电费1.2元/度,满电使用30 min)。
(三)试验结果
1. 效率表现:装载高度1 m时,最短作业时间47.5 s;装载高度1.5 m时,最短作业时间57.1 s,各组试验数据标准差较小,作业稳定性良好。
2. 成本与效率对比:与传统叉车相比,该装置可节约装载成本57.5%,提高装载效率11.9%,有效验证了其功能完整性与作业优越性。
六、结论
1. 设计的整垛袋装物料旋转式推进装载装置集成了物料装载与托盘回收功能,通过电控系统实现自动化作业,解决了传统装置功能单一、效率低下的问题。
2. 静力学仿真表明,3种核心工况下装置最大变形量不超过25 mm,最大等效应力不超过324 MPa,均小于材料许用应力,结构安全可靠。
3. 试验验证显示,装置在不同装载高度与物料重量下作业稳定,最短作业时间47.5 s,相比传统叉车成本降低57.5%、效率提升11.9%,为物流行业降本增效提供了新方案。
参考文献
[1] 喜崇彬. 制造业物流的升级优化[J]. 物流技术与应用, 2016,21(3):92.
[2] 杨守德. 技术创新驱动中国物流业跨越式高质量发展研究[J]. 中国流通经济, 2019,33(3):62-70.
[3] 吴皓楠. 聚焦高端装载机 雷沃工程机械全力满足客户需求[J]. 工程机械, 2020,51(3):7.
[4] 吴占文, 马一民, 常淑珍, 等. 工程机械效益评价指标模型[J]. 长安大学学报(自然科学版), 2007,27(1):92-95.
[5] OMANN F L. Rock and material loading apparatus: US19960702147[P]. 1997-09-09.
[6] 李翔. 袋装物品棚车推板式装载装置的虚拟设计[D]. 兰州: 兰州理工大学, 2013.
[7] 郑亚波, 陈玉洁. 铁路货场棚车装载装置的研究[J]. 铁道货运, 2017,35(9):54-58.
[8] 李有堂, 纪宪军. 棚车装载运送小车转向机构的虚拟设计[J]. 机械设计与制造工程, 2019(6):48.
[9] FAN W B. Exhaust emission characteristics of typical construction machinery and its contribution to atmospheric pollutants in Chengdu[J]. Journal of Environmental Sciences, 2023,125:761-773.
[10] 马尚鹏. 整垛袋装物料旋转式推进装载装置的设计与研究[D]. 石河子: 石河子大学, 2024.
[11] 曲长富. 翻车机翻卸不同散装物料对车体应力分布影响研究[D]. 大连: 大连交通大学, 2021.
[12] 李体仁, 周小琦. ANSYS和ADAMS在菌落挑取机器人结构设计中的运用[J]. 机械设计与制造, 2024(1):327-331.
[13] 李慧亮, 罗玉梅. 基于有限单元法自卸车货箱不同工况承载分析[J]. 机械设计与制造, 2023,394(12):181-185.
[14] 干勇, 田志凌. 钢铁材料手册(上)[M]. 北京: 化学工业出版社, 2009.
[15] 胡静波, 冯月贵, 颜竞峰, 等. 起重机双折线钢丝绳缠绕系统静力学分析[J]. 机械制造与自动化, 2016,45(2):43-46+89.
[16] 陈炳木. 桥梁三维模型网格划分与接触处理的方法研究[D]. 重庆: 重庆交通大学, 2024.
[17] 闫杰, 徐莉萍, 孙富强, 等. 磨机换衬板机械臂静力学与模态分析[J]. 矿山机械, 2021,49(3):39-42.
[18] IKUTA M, MIYANO E. Deformation of thorax under static loading: simulation analysis using finite element method[J]. Japanese Journal of Physiological Anthropology, 2004,9:163-166.
[19] 王书新, 李景林, 齐光, 等. 空间相机用爆炸螺栓防护装置[J]. 光学精密工程, 2014,22(12):3318-3323.