摘要:摘要: 针对气吸式玉米高速播种机导种过程中种子碰撞损伤和投种精度差的问题,该研究设计了一种向控轮旋拨导向-毛刷带转运投种的毛刷带式导种装置。通过对关键结构的设计和理论分析,
摘要: 针对气吸式玉米高速播种机导种过程中种子碰撞损伤和投种精度差的问题,该研究设计了一种向控轮旋拨导向-毛刷带转运投种的毛刷带式导种装置。通过对关键结构的设计和理论分析,确定影响导种性能的主要因素和各因素取值范围。利用Adams-EDEM耦合仿真方法进行向控轮导向过程单因素试验,结果表明:向控轮相对排种盘安装角度为15°时,种子满足导向要求且导向轨迹稳定;搭建试验台架,以刷毛长度、带轮直径为试验因素,粒距合格率、重播率、漏播率为试验指标,开展二次旋转正交组合试验,试验结果表明:在作业速度13km/h条件下、刷毛长度为25mm,带轮直径为53mm时,粒距合格率为96.03%,漏播率为1.76%,重播率为3.48%;根据最优参数组合验证不同作业速度下导种装置的性能,结果表明,当作业速度在12~16km/h时,粒距合格率不低于94.3%,重播率不高于3.92%,漏播率不高于3.19%,破损率不高于0.19%。该研究可为玉米高速播种作业条件下导种装置的设计优化提供参考。
关键词: 农业机械;玉米;高速播种;导种装置;Adams-EDEM
论文《毛刷带式玉米高速导种装置的设计与试验》发表在《农业工程学报》,版权归《农业工程学报》所有。本文来自网络平台,仅供参考。
0 引言
玉米作为中国种植面积最广的粮食作物,在土地集约化形势下,抢抓农时、适熵播种、提升单产等都对玉米高速精量播种提出了更高要求[1]。气吸式精密排种技术配合约束导种及零速投种技术是目前高性能播种的主要发展与研究方向[2]。具备扰动充种、多级清种等技术的精密排种技术已然较为成熟可靠,但与之配合的约束导种,尤其是高速时种子与约束导种装置碰撞导致种子运移轨迹不可控,最终导致投种时粒距变异系数急剧增大的导种技术仍然是研究的重难点。
为了解决高速导种过程中种子碰撞损伤和投种精度差的问题,国内外公司和学者主要研究设计了气流输送式、隔板带式和毛刷带式三种形式的高速导种装置[3]。气流输送导种装置,利用气力输送技术使种子在气流裹挟下通过导种管。德国Amazone公司EDX系列播种机和英国Ferguson公司MF543型播种机采用在导种管内引入正向气流的方式,使种子在正压气流作用下沿导种管壁快速滑落,可实现低位投种和同步仿形[4]。刘瑞等[5]基于文丘里原理,分析气流输送导种和零速投种机理,进一步设计确定了气流导种装置关键结构参数和导种装置曲线。王云霞等[6]设计了一种适用于气流高速投种的播种机压地装置,通过在导种管后方布置压种轮的方式减少种子在气流加速下产生的落地弹跳现象。隔板带式导种装置利用隔板形成种腔,强制种子保持单粒有序运移。美国Precision Planting公司设计了具有纳种装置的Speed Tube型输送带式导种装置[7]。陈学庚等[8]在综合取种盘转速、播种机行走速度情况下,设计了一种传动与投种机构一体的带式导种装置。刘全威[9]提出了一种准确纳种、平稳输种和精准投种的种子投送方法,设计了一种拨指同步带式种子精确投送机构。马成成等[10]在拨指同步带导种装置基础上,提出了一种在拨指表面添加人字形纹路的改进方法,优化了纳种合格指数和种腔间隔变异系数。毛刷带式导种装置利用柔性刷毛与导种管壁对种子的运移进行全自由度约束。美国John Deere公司设计的Exact-Emerge毛刷带式导种装置,通过调节毛刷带的转速控制种子落地水平初速度可实现零速投种[11]。
综上所述,气流输送导种降低了种子碰撞无序的风险和机具振动的影响,但气流加速下种子投出速度过大,难以平衡。隔板带导种可保证播种粒距均匀分布并且可以通过调整带的转速保证种子投种状态,但隔板间距的限制导致排种器与导种带的转速调节难以适应不同的作业速度变化。毛刷带导种具有导种轨迹稳定、投种速度可控和导种性能受外部因素影响小等特点,但目前该装置导种机理尚不明确,主要结构参数不清晰,种子由排种器至毛刷带的转运过程也有待研究。
本文在现有导种装置研究基础上,设计一种带有向控轮辅助纳种机构的毛刷带式导种装置,确定关键部件的结构及工作参数,通过EDEM-Adams耦合仿真和台架试验分析得到装置最优参数组合,并进行不同作业速度下导种性能验证试验。
1 整体结构与工作原理
1.1 整体结构
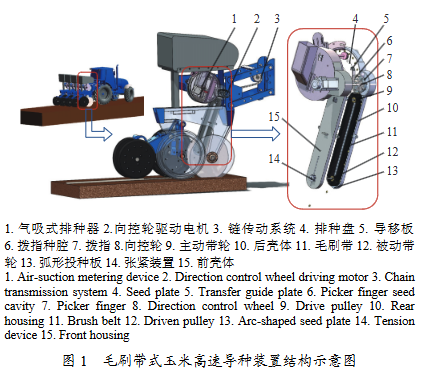
毛刷带式导种装置主要由向控轮、向控轮驱动电机、导移板、毛刷带、主动带轮、被动带轮、链传动系统以及装置外壳体等部件组成,如图1所示,主要技术参数如表1所示。装置外壳体安装于排种器卸种口处,向控轮、带轮和毛刷带内置于壳体中,向控轮和带轮的传动轴通过前后壳体轴承座分别与壳体外部向控轮驱动电机和链传动系统连接。通过调节向控轮驱动电机转速可在更换不同吸孔数量排种盘或排种器转速改变条件下保证向控轮与排种盘的配合关系。利用链传动系统设置主动带轮与机组前进速度的固定传动比,结合弧形投种板投种角度调节,可以保证种子投出速度与作业速度大小相同,方向相反,从而实现零速投种。
表1 导种装置主要技术参数
参数 Parameters 数值 Values
外形尺寸(长×宽×高)/(mm×mm×mm) 140×55×670
排种器类型 Type of metering device 气吸式排种器
毛刷带长度(周长)/mm 1000
刷毛尺寸(截面直径×长度)/(mm×mm) 0.5×25
带轮直径 Belt wheel diameter/mm 53
播种速度 Sowing speed/(km·h⁻¹) ≤16
1.2 工作原理
播种开始时,辅助纳种向控轮与排种盘在各自驱动电机驱动下以固定速比相对转动,主动带轮由播种机地轮经链传动系统驱动。向控轮拨指在旋转至籽粒脱离排种盘位置时在自身重力作用下闭合形成拨指种腔,种子随排种盘转过排种器负压腔室后,掉落进拨指种腔内,随后在向控轮和导移板共同作用下排放至毛刷带上,种子跟随毛刷带旋转运移至弧形投种板并投入到种沟内,可满足12~16km/h的作业速度。
2 导种装置结构设计与导种性能分析
2.1 辅助纳种机构设计
为了提高毛刷带纳种稳定性,设计了旋拨导向方式的纳种辅助装置。以向控轮旋转过程中拨指开合形成种腔单粒装载种子的方式对种子运移方向进行引导,并在拨出时配合导移板使种子精准投入到导种管运移轨迹中,提高种子从排种盘转运到导种毛刷带的稳定性和精准度。
辅助纳种向控轮主要由向控轮主体、拨指、拨指轴组成,如图2所示。综合考虑气吸式排种器排种盘卸种区位置尺寸和不干涉排种器内部结构正常工作前提下,设计向控轮主体最大圆周直径为90mm。为满足向控轮和排种盘转速匹配,同时提高向控轮利用效率,设计拨指数量为8个,且沿向控轮圆周均匀分布,拨指和向控轮主体通过拨指轴连接。拨指轴与向控轮其上开孔过盈配合,以保证拨指轴随向控轮固定转动。拨指轴孔与拨指轴间隙配合,以保证拨指随向控轮转动在重力作用下依靠自身重力实现开合。向控轮与排种盘转速配合,使得拨指开合形成拨指种腔实现单粒种子的纳入与拨出。以常用郑单958玉米种子为对象进行三轴尺寸测量,得到玉米种子最大粒径为12.6mm,为保证种子精确掉落在拨指上,设计拨指厚度为25mm,向控轮主体厚度为55mm。为防止向控轮导向过程中种子从拨指种腔内提前拨出,在向控轮侧边设计导移板,导移板同时可作为排种盘清种结构保证在排种盘转过纳种装置时吸孔无残留吸附种子,提高辅助纳种向控轮工作稳定性。
2.2 辅助纳种机构安装位置与关键参数分析
2.2.1 向控轮充种过程
以向控轮中心为原点建立坐标系,如图3所示,对籽粒开始离开排种盘至籽粒落入种腔过程进行运动学分析。籽粒A为种子在种盘上失去吸附力的瞬时位置,籽粒B为种子落到拨指种腔的瞬时位置,籽粒C为下一粒种子在拨指上的落点位置。
籽粒A在失去气流吸附力后,仅受自身重力和随排种盘圆周运动的离心力,以A籽粒中心为原点,建立直角坐标系。将籽粒受力和速度分别向x轴、y轴分解:
left{�egin{array}{l} F_x=F'cos�eta\ F_y=F'sin�eta+Gend{array}
ight.
left{�egin{array}{l} v_x=R_1omega_1sin�eta\ v_y=R_1omega_1cos�etaend{array}
ight.
假设籽粒从将要离开排种盘到落至拨指种腔所需时间为t:
t=frac{2pi}{n_1omega_1}=frac{2pi}{n_2omega_2}qquad(3)
式中: n_1 为排种盘吸种孔数量; n_2 为向控轮拨指数量。
在t时间内籽粒A在x轴、y轴方向的位移量 Delta x_1、 Delta y_1 可以表示为
left{�egin{array}{l}Delta x_1=v_{1x} t+frac{a_x t^2}{2}\ Delta y_1=v_{1y} t+frac{a_y t^2}{2}end{array}
ight.
其中 left{�egin{array}{l} a_x=R_1omega_1^2cos�eta\ a_y=R_1omega_1^2sin�eta+gend{array}
ight.
式中g为重力加速度, m/s^2。
籽粒C需要在同时间t内转到B位置,转过角度差 Deltaalpha 可表示为
Deltaalpha=alpha_1-alpha_2=omega_2 tqquad(6)
根据余弦定理有:
left{�egin{array}{l} L_1=sqrt{R_1^2+L^2-2 R_1 Lcos(�eta+ heta)}\ alpha_3=arccosleft(frac{L_1^2+L^2-R_1^2}{2 L_1 L}
ight)end{array}
ight.qquad(7)
化简得:
alpha_3=arccosleft(frac{L-2 R_1cos(�eta+ heta)}{sqrt{{R_1}^2+L^2-2 R_1cos(�eta+ heta)}}
ight)qquad(8)
在图3坐标系下将籽粒A运动到籽粒B的位移向x轴和y轴分解:
left{�egin{array}{l} L_1cosalpha_4-R_2cosalpha_2-Delta x_1=0\ L_1sinalpha_4-R_2sinalpha_2-Delta y_1=0end{array}
ight.qquad(9)
其中 left{�egin{array}{l}alpha_4=alpha_3+ heta\alpha_2=alpha_1-Deltaalphaend{array}
ight.
将式(4)~(8)代入式(9)可得:
left{�egin{array}{l}sqrt{{R_1}^2+ L^2- 2 R_1 Lcos(�eta+ heta)}cosleft[arccosleft(frac{L- 2 R_1cos(�eta+ heta)}{sqrt{{R_1}^2+ L^2- 2 R_1 Lcos(�eta+ heta)}}
ight)+ heta
ight]\ -left( R_1omega_1sin�eta t+frac{1}{2} R_1omega_1{}^2cos�eta t^2
ight)= R_2cosleft(alpha_1-omega_2 t
ight)\ sqrt{{R_1}^2+ L^2- 2 R_1 Lcos(�eta+ heta)}sinleft[arccosleft(frac{L- 2 R_1cos(�eta+ heta)}{sqrt{{R_1}^2+ L^2- 2 R_1 Lcos(�eta+ heta)}}
ight)+ heta
ight]\ -left( R_1omega_1cos�eta t+frac{1}{2}left( R_1omega_1{}^2sin�eta+g
ight) t^2
ight)= R_2sinleft(alpha_1-omega_2 t
ight)end{array}
ight.
为确保种子单粒顺序由排种盘掉落进向控轮拨指种腔,由式(3)可知,当机器前进速度确定时,排种盘和向控轮的转动速比仅与排种盘吸种孔数量和向控轮拨指种腔数量有关。当向控轮满足导向要求时,图3中各参数应满足式(11)所示关系,向控轮结构参数确定后,L_1、 R_2 为已知量,若排种盘半径确定,则 R_1、�eta 也可确定,此时向控轮导向效果受 alpha_1、alpha_2、alpha_3、alpha_4、 L、 heta 影响,又因为 alpha_1、alpha_2、alpha_3、alpha_4、 L 均随 heta 改变而改变,所以向控轮相对排种盘的安装角度 heta 是影响导向效果的主要因素。由于导向过程种子与向控轮的互作关系较为复杂,后文将利用仿真分析的方法对 heta 进行确定,同时确定向控轮的安装位置。
2.2.2 向控轮导向排放过程
向控轮导向过程种子受力分析如图4所示,种子相对向控轮中心作圆周运动且逐渐远离向控轮中心,种子相对拨指轴作圆周运动且逐渐靠近拨指轴。种子在导向过程中仅受自身重力、向控轮转动所施加的向心力、拨指给予的支持力和摩擦力。
种子从到达拨指理想落点至拨指拨出过程由能量守恒有:
lint_0^delta F_f~ddelta+Delta Rint_{R_2}^{R_3} m R^2omega_2 dR+m g h=frac{m v_2{}^2}{2}qquad(12)
其中
left{�egin{array}{l} F_f=F_nmu_1\ Delta R=R_3-R_2end{array}
ight.
式中 mu_1 为种子与拨指表面的摩擦系数。
由式(12)可知,种子在拨出时的速度 v_2 与向控轮转速 omega_2、种子在拨指上运动过的弧长l、种子与拨指表面的摩擦系数 mu_1 有关,而弧长l由拨指的弯曲弧度决定,考虑到向控轮的结构尺寸限制,以及拨指应能够在拨指种腔自由开合,拨指结构尺寸可变动范围很小,因此种子拨出时,速度 v_2 主要由向控轮转速 omega_2 决定。
2.3 导种毛刷带设计和导投种机理分析
2.3.1 纳种过程分析
刷管内种子受力分析如图5所示,刷毛与种子碰撞瞬间,假设碰撞过程中系统没有机械能损失,在碰撞间隔时间内,能量传递满足以下关系:
frac{1}{2} J_1omega_3{}^2-frac{1}{2} J_2omega_3^2=frac{1}{2} mleft(v_3^2-v_2{}^2
ight)qquad(14)
式中 J_1、 J_2 分别为落种前后刷毛的转动惯量, kg/m^2; m为种子颗粒质量, kg。
由式(14)可知,玉米种子能否精准落在刷毛上并在毛刷带和管壁共同作用下稳定运移,主要与种子下落时刷毛密度和刷毛长度(影响转动惯量)以及毛刷带的速度有关,而刷毛密度除了与制作毛刷带的工艺这一不可控因素有关之外,和带绕带轮的弯曲程度也有关,因此带轮的直径可作为替代刷毛密度的可控试验因素。
2.3.2 运种过程分析
刷管内种子稳定运移状态下,种子在毛刷带作用下沿导种管内壁匀速向下运动,种子相对刷毛无滑移。由于毛刷对种子作用力受种子掉进刷管内的形态、种子尺寸等影响较大,且毛刷弯曲程度较为复杂,在受力分析中,仅将与种子直接接触的刷毛分为给予种子顶端压力和给予种子底端支持力两部分进行分析,如图5所示。
受力平衡状态下:
left{�egin{array}{l} F_{N1}singamma_1-F_{N2}singamma_2+F_msinsigma-mu_2 F_mcossigma=0\ -F_{N1}cosgamma_1+F_{N2}cosgamma_2+F_mcossigma-mu_2 F_msinsigma=Gend{array}
ight.
式中 mu_2 为种子与导种管内壁的摩擦系数。
毛刷带导种过程中种子与刷毛运动状态如图6所示,此时刷毛几何形状、约束条件和受力特性与悬臂梁高度相似,同时刷毛的尼龙弹性材料符合线弹性假设,适用胡克定律[12]。由于刷毛数量较多,实际使用中涉及摩擦、刷毛间的相互作用、动态载荷等问题,难以通过理论计算或有限元分析的方法进行参数设计。因此将刷毛简化成悬臂梁进行分析,通过梁的计算式计算挠度、弯曲应力等主要力学特性,从而优化毛刷带结构参数,保证导种稳定性。
对于自由端受横向集中力 F_N 的悬臂梁,其最大挠度 au_{max} 为
au_{max}=frac{F_N s^3}{3 E I}quad(16)
式中E为刷毛弹性模量, Pa; I为截面惯性矩, mm^4。
在刷毛状态为小变形( aull s)假设下,刷毛末端的弯曲可近似为直线倾斜,刷毛末端切线与原轴线的夹角可表示为
gammaapprox angamma=frac{ au}{s}qquad(17)
将式(16)代入式(17):
gammaapproxfrac{F_N s^3/3 E I}{s}=frac{F_N s^2}{3 E I}qquad(18)
当刷毛受种子作用力方向与变形后刷毛垂直时, gamma、 F_N 分别对应于图5中顶端刷毛的 gamma_1、 F_{N1} 和底端刷毛的 gamma_2、 F_{N2}:
left{�egin{array}{l}gamma_1=frac{F_{N1} s^2}{3 E I}\ gamma_2=frac{F_{N2} s^2}{3 E I}end{array}
ight.
将式(19)代入式(15):
left{�egin{array}{l} F_m=frac{G+F_{N1}-F_{N2}}{cossigma-mu_2sinsigma}\ frac{left(F_{N1}^2-F_{N2}^2
ight) s^2}{3 E I}=-frac{left(G+F_{N1}-F_{N2}
ight)left(sinsigma-mu_2cossigma
ight)}{cossigma-mu_2sinsigma}end{array}
ight.
挠度约束条件为
left{�egin{array}{l} F_{N1}leqslantfrac{3 E I au_{max}}{s^3}\ F_{N2}leqslantfrac{3 E I au_{max}}{s^3}end{array}
ight.
种子受刷毛作用力最大时:
F_{N1}=F_{N2}=frac{3 E I au_{max}}{s^3}quad(22)
将式(22)代入式(20),得出刷长度s下限,根据式(21)得出长度s上限,则刷毛长度取值范围为
sqrt[3]{frac{3 E I au_{max}}{maxleft(F_{N1}, F_{N2}
ight)}}leqslant sleqslantsqrt[3]{frac{3 E I au_{max}}{minleft(F_{N1}, F_{N2}
ight)}}quad(23)
当种子质量为0.005 kg,弹性模量E为3 GPa,摩擦系数 mu_2 为0.4,刷毛直径选取为0.5mm,直接作用于种子的刷毛数量约20时,在允许最大挠度为0.5mm条件下,将以上参数代入式(23),计算得出刷毛长度极限:
left{�egin{array}{l} s_{max}approx 39~mm\ s_{min}approx 24~mmend{array}
ight.
选取刷毛长度因素的水平取值范围为20~40 mm,为后文试验优化提供理论依据。
2.3.3 投种过程分析
零速投种技术是指种子落入种床的瞬间相对地面速度接近于零[14]。本文设计的刷管式导种装置,通过调节投种板位置使投种点始终位于刷管最低点,通过调节毛刷带的转速使种子投下瞬间的水平速度与播种机前进速度相近且反向,相互抵消实现零速投种,垂直方向上种子无速度。投种过程如图7所示。投种瞬间种子水平方向速度有:
v_3=left(R_4+s
ight)omega_3=Vquad(25)
式中 R_4 为毛刷带轮半径, mm。
假设种子在毛刷管里的间距大小为k,导种装置投下两粒种子间隔时间为T:
T=frac{W}{V}=frac{k}{v_3}
k=v_3frac{2pi}{8omega_2}
将式(27)代入(26)式可得:
T=frac{W}{V}=frac{pi}{4omega_2}quad(28)
由式(28)可知,在理想工作状态下,种子能否在给定机组工作速度下达到设定粒距仅与向控轮的转速 omega_2 有关,而与毛刷带轮的转速 omega_3 无关。在实际工作情况中,投种过程类似纳种过程的反作用过程,因此投种效果仍与刷毛长度、带轮直径以及毛刷带速度有关。为防止出现投种时种子卡在刷毛之间不能及时投种现象,应以上述因素作为变量进行试验,但是为了同时满足零速投种技术要求和设定的机组工作速度条件,实际工作中机组工作速度需要通过带轮转速调节,因此以上三因素不可同时作为后续检验导种性能的台架试验的试验因素。
3 向控轮导向过程仿真试验分析
为考虑种子与辅助纳种部件的相互作用,以期获得导向过程种子运动方式和轨迹,同时根据导种轨迹确定向控轮最佳安装位置,利用多体动力学仿真软件Adams与离散元仿真软件EDEM耦合仿真方式对种子运移路径全面模拟[15]。
3.1 仿真模型与参数
利用Solidworks以郑单958玉米种子为对象建模,同时将本文设计的辅助机构简化为向控轮主体、拨指、拨指轴、导移板4部分,分别导出种子和辅助纳种机构模型的step文件。
将种子模型step文件通过EDEM中Render Options模块导入并作为种子颗粒模板进行填充,填充平滑度设置为5时,为满足填充率,设置填充颗粒为半径1.18mm的球体,填充数量为116个[16]。
将辅助纳种机构模型step文件分别导入EDEM和Adams中,在EDEM中根据导入后的向控轮位置结合实际工作时向控轮纳入种子时的相对位置添加颗粒工厂。在Adams中设定向控轮运动参数:导移板和地面之间施加固定副;向控轮主体和地面之间施加旋转副并添加旋转驱动;各拨指轴和向控轮主体之间分别施加固定副;各拨指和向控轮主体之间分别添加接触力,接触类型设定为实体对实体,法向力设定为碰撞,刚度为1x10^8 N/m,摩擦力设定为库仑摩擦;各拨指和各拨指轴之间分别施加旋转副;对所有耦合部件添加G-Force以实现EDEM中颗粒力的传递。
Adams中导出(.adm)文件,修改(.acf)命令控制文件,配置(.cosim)耦合仿真文件及环境变量,在Adams Co-simulation中加载耦合仿真文件实现 EDEM-Adams的双向实时数据传递[17]。仿真模型如图8所示。根据前期测量及查阅[18-22],种子和辅助纳种机构的耦合仿真参数如表2所示。
表2 耦合仿真模型参数
项目Items 参数 Parameters 参数 Parameters泊松比剪切模量/GPa 数值 Values
种子颗粒 Seed particle(SP) 密度/(kg·m⁻³) 1.20
泊松比 0.40
剪切模量/GPa 0.14
拨指 Picker finger(PF) 密度/(kg·m⁻³) 2750
泊松比 0.37
剪切模量/GPa 27.37
导移板 Transfer guide plate(TGP) 密度/(kg·m⁻³) 1330
泊松比 0.35
剪切模量/GPa 1.09
种子颗粒-种子颗粒 SP and SP 碰撞恢复系数 0.18
静摩擦系数 0.03
动摩擦系数 0.01
种子颗粒-拨指 SP and PF 碰撞恢复系数 0.62
静摩擦系数 0.34
动摩擦系数 0.52
种子颗粒-导移板 SP and TGP 碰撞恢复系数 0.71
静摩擦系数 0.46
动摩擦系数 0.09
3.2 仿真方法
由2.2.1分析可知,向控轮相对排种盘的安装位置由L、θ决定,且L、θ与第一个配合的拨指种腔相对向控轮中心的初始角度有关,在排种器尺寸确定后,排种盘与向控轮中心连线距离L也即确定,所以旋拨导向效果主要由θ决定。在仿真试验中,通过改变颗粒工厂相对水平面的角度来模拟向控轮安装倾角θ的变化,通过设置颗粒下落初始速度来模拟种子由排种盘落入向控轮种腔的初速度。考虑到向控轮与上方排种盘和下方毛刷管安装配合,试验时分别设置θ为10°、15°、20°这3个水平,通过EDEM后处理导出仿真过程种子位置坐标并绘制轨迹图分析最佳安装角度。
3.3 仿真结果分析
图9为向控轮导向过程仿真结果,图中坐标系以向控轮回转中心为原点建立,导向结束位置设置EDEM软件中内置的速度分布传感器(velocity profile sensor),以监测种子被拨出时的速度大小。为更直观体现向控轮导向效果,导出在3种不同安装角度下仿真过程中种子在X-Y平面内的坐标信息并导入到Origin软件中绘制轨迹图,如图10所示。
结合2.1.1节分析,种子在拨指上的理想落点X轴位置为45~50mm。由图10a可知,当安装角度为10°时,种子在X轴为53mm的位置下接触到向控轮并开始导向,未达拨指上理想落点;由图10c可知,当安装角度为20°时种子在X轴为48mm位置下接触到拨指并开始导向,满足向控轮上理想落点位置要求,但由于接触向控轮时X方向速度有所增大,会在后一拨指碰撞下弹跳导致导向轨迹不稳定;因此,最终选择向控轮相对排种盘安装角度θ为15°,此时种子满足理想落点,并在导向过程中运移轨迹稳定。
导出在安装角度为15°时仿真10s内所有生成的种子在拨出时的速度数据并导入Origin软件中制作散点图,如图11所示。种子拨出时竖直方向平均速度为0.2585m/s,水平方向的平均速度为0.3663m/s,满足毛刷带稳定纳种的要求。
4 台架试验
4.1 试验材料与设备
选取郑单958为玉米种子试验对象,种子形态为硬粒马齿型[25],测定千粒质量为307g,含水率11.9%,三轴平均尺寸7.02mm(100粒种子)。试验地点为青岛农业大学排种装置综合实验室,试验装置主要由22孔气吸式排种器、JPS-12型排种性能试验台、带有旋拨辅助纳种机构的毛刷管式导种装置、计算机以及配套的电机及控制系统组成。其中本文设计的导种装置中的辅助纳种向控轮、拨指以及刷管外壳均由3D打印获得,向控轮、拨指材质为铝合金,外壳材料为白色树脂。刷管中的毛刷带特殊定制,制作方法为确定平带尺寸参数后在外圈表面压胶栽毛制作。气吸式排种器、向控轮、毛刷带轮驱动部分分别由扭矩为110×16、57×3、110×8 N·m的步进电机组成,排种器电机驱动器为DM3522,向控轮电机和主动带轮电机的驱动器为DM542,控制器为CM40L三轴一体式步进电机控制器,可同时控制三台电机转速调节及启停[26-28]。试验时,将前期预试验选取的22孔排种盘气吸式排种器和导种装置固定在试验台上,通过调节种床带相对于排种器运动速度来模拟播种机前进运动状态,喷油泵将油喷于种床带上,玉米籽粒从导种装置投种口落至涂有油层的种床带上。台架试验如图12所示。
4.2 试验方法
根据2.3.2节理论分析和实际安装制作要求,配合各因素可控有效范围,选取带轮直径范围为35~65mm,刷毛长度范围为15~45mm,采用二因素五水平试验探究毛刷带式导种装置最佳作业性能,试验因素编码如表3所示。
表3 试验因素编码表
水平 Level 带轮直径 Pulley diameter D/mm 刷毛长度 Bristle length s/mm
-1.414 36 16
-1 40 20
0 50 30
1 60 40
1.414 64 44
作业速度设定为13km/h,标准粒距设定为20cm,根据式(3)可推算出辅助纳种向控轮和排种盘转速分别为135、49.5 r/min,根据式(28)和每组试验号中带轮直径、刷毛长度的因素值大小可计算出相应的每个试验号中带轮转速的大小,其他参数保持恒定。根据《玉米免耕播种机作业质量NY/T1628-2008》中对玉米播种机播种效果的要求,以粒距合格率Y₁、重播率Y₂、漏播率Y₃为试验指标[29]。试验时保证每组试验号试验测定籽粒的数量不低于1000粒。
left{�egin{array}{l} Y_1=frac{Q_1}{Q_0} imes 100\%\ Y_2=frac{Q_2}{Q_0} imes 100\%\ Y_3=frac{Q_3}{Q_0} imes 100\%end{array}
ight.qquad(29)
式中 Y_1 为粒距合格率,%; Q_1 为合格粒距数,个; Q_0 为测定粒距总数,个; Y_2 为漏播率,%; Q_2 为漏播粒距数,个; Y_3 为重播率,%; Q_3 为重播粒距数,个。
4.3 试验结果分析
试验方案与结果如表4所示。利用Design-Expert 13.0软件对试验数据回归分析,得出性能指标与因素编码值回归方程,并检验其显著性。
表4 试验方案与结果
序号 No. 带轮直径 Pulley diameter D/mm 刷毛长度 Bristle length s/mm 粒距合格率 Qualified spacing rate Y₁/% 重播率 Multiple seeding rate Y₂/% 漏播率 Missed seeding rate Y₃/%
1 50 30 95.5 2.4 3.1
2 50 44 92.5 2.4 7.9
3 60 20 95.3 5.4 0.8
4 36 30 90.7 2.3 7.1
5 40 20 88.6 2.6 9.5
6 40 20 94.0 2.7 4.1
7 50 16 95.8 3.5 1.1
8 64 30 95.8 4.4 0.2
9 50 30 96.5 3.3 3.6
10 50 30 95.6 2.6 2.8
11 60 40 96.2 2.9 1.6
12 50 30 94.4 2.7 3.2
13 50 30 94.7 2.7 3.6
方差分析结果如表5所示,回归方程如式(30)所示。由表5可知,粒距合格率( Y_1 )、漏播率( Y_2 )和重播率( Y_3 )的回归模型P值均<0.01,且失拟项P值均>0.05,表明三者的回归模型均极显著,且不存在显著失拟问题,模型拟合度较高,能够有效解释响应变量的变异规律。进一步分析交互作用发现,带轮直径(D)与刷毛长度(s)的交互项(D s)对 Y_1、 Y_2 和 Y_3 的影响同样极显著,P均<0.01,说明两参数并非独立作用,其交互作用对播种性能的调控具有关键意义。由于交互作用显著影响了所有响应变量,因此需结合响应面分析法,确定D与s的最优组合。将试验数据导入origin软件绘制响应曲面图,如图13所示。
left{�egin{array}{l} Y_1=95.340+2.010 D-1.150 s+1.580 D s-\ 1.090 D^2-0.638 s^2\ Y_2=1.300-0.083 D+0.166 s-0.006 D s+\ 0.003 D^2+0.001 s^2\ Y_3=2.995-0.090 D+0.412 s-0.012 D s+\ 0.002 D^2+0.006 s^2end{array}
ight.
4.4 响应面分析
综合分析各响应曲面可以得出:当毛刷带轮直径增大时,粒距合格指数增大,漏播率和重播率降低,分析其原因为纳种过程中,带轮直径越大,相同刷毛密度下毛刷带在经过带轮时刷毛顶端间隙张开更大,更利于种子落入刷毛中,增加纳种合格率从而提高了粒距合格指数。同时三个性能指标随刷毛长度增大呈先增大后减小的趋势,分析其原因为,刷毛过短或过长都会使种子在运种过程中相对刷毛有滑移,刷管内种子间距合格率降低。
4.5 参数优化与验证
使用Design-Expert 13软件优化模块优化求解,优化目标函数和约束条件为
left{�egin{array}{l}max Y_1(D, s)\ min Y_2(D, s)\ min Y_3(D, s)\ ext{s.t}left{�egin{array}{l}35~mmleqslant Dleqslant 65~mm\ 15~mmleqslant sleqslant 45~mmend{array}
ight.end{array}
ight.
通过优化求解,得出当带轮直径约为53mm、刷毛长度约为25mm时,导种性能最优,此时对应的粒距合格率为96.03%,漏播率为1.76%,重播率为3.48%。
4.6 导种性能验证试验
为验证设计的导种装置满足高速工作条件,在参数优化试验得出的刷管最优参数条件下,分别进行工作速度为12、13、14、15、16km/h的台架试验。此时排种盘、向控轮、毛刷带轮的速度均可由式(3)、(25)和(28)分别计算得出,如表6所示。
表6 试验装置各部分速度匹配表
工作速度 Working speed/(km·h⁻¹) 排种盘 Seed plate/(r·min⁻¹) 向控轮 Direction control wheel/(r·min⁻¹) 主动带轮 Drive pulley/(r·min⁻¹)
12 45.5 124.9 530.5
13 49.2 135.4 574.7
14 53.0 145.8 618.9
15 56.8 156.3 663.1
16 60.6 166.7 707.4
每组速度各进行3次试验,取平均值,每次试验保证排种粒数超过1000粒,试验方法同上,试验结果如图14所示。
由图14可知,当作业速度在12~16 km/h内时,粒距合格率不低于94.3%,重播率不高于3.92%,漏播率不高于3.19%,破损率不高于0.19%,符合气吸式高速播种机作业质量要求。
5 结论
1)针对气吸式玉米高速播种机导种过程中种子碰撞损伤和投种精度差的问题,设计了向控轮旋拨导向-毛刷带转运投种的毛刷带式导种装置,通过对关键结构的设计和理论分析,确定了影响导种性能的主要因素和各因素取值范围。
2)通过EDEM-Adams软件耦合仿真对向控轮导向过程中种子的运移轨迹进行模拟,以最佳导向曲线为指标,对向控轮安装位置参数进行优化,结果表明:向控轮相对排种盘的安装角度为 15^{circ} 时导向轨迹最优。
3)通过台架试验以粒距合格率、重播率、漏播率为试验指标,以刷毛长度、带轮直径为试验因素开展二次旋转正交组合试验,并基于Design-Expert软件优化试验参数。优化得到毛刷带轮直径为53mm,刷毛长度为25mm时粒距合格率为96.03%,漏播率为1.76%,重播率为3.48%。以优化后的结构参数进行作业速度验证试验,试验结果表明:当作业速度在12~16km/h内时,粒距合格率不低于94.3%,重播率不高于3.92%,漏播率不高于3.19%,破损率不高于0.19%。
参考文献
[1] 李少昆,赵久然,董树亭,等. 中国玉米栽培研究进展与展望[J]. 中国农业科学,2017,50(11): 1941-1959.
[2] 杨丽,颜丙新,张东兴,等. 玉米精密播种技术研究进展[J]. 农业机械学报,2016,47(11): 38-48.
[3] 廖宜涛,李成良,廖庆喜,等. 播种机导种技术与装置研究进展分析[J]. 农业机械学报,2020,51(12): 1-14.
[4] LIU R, LIU L J, LI Y J, et al. Numerical simulation of seed-Movement characteristics in new maize delivery device[J]. Agriculture, 2022, 12(11): 1944.
[5] 刘瑞,刘云强,刘忠军,等. 玉米高速精量播种机正压气流辅助吹送导种装置研究[J]. 农业机械学报,2023,54(7): 156-166.
[6] 王云霞,张文毅,严伟,等. 气流辅助高速投种精量播种机压种装置设计与试验[J]. 农业机械学报,2020,51(10): 69-76.
[7] AHMADI M. Developing a New Powered Seed Delivery System with Constant Seed Release Speed Using Two Confronting Belts[D]. North Dakota State: North Dakota State University, 2018.
[8] 陈学庚,钟陆明. 气吸式排种器带式导种装置的设计与试验[J]. 农业工程学报,2012,28(22): 8-15.
[9] 刘全威. 高速播种机种子精准投送机构设计与试验研究[D]. 北京: 中国农业大学,2017.
[10] 马成成,衣淑娟,陶桂香,等. 带式玉米高速导种装置旋夹纳种机理分析与参数优化[J]. 农业机械学报,2023,54(7): 134-143.
[11] ZHANG W Z, LIU C L, LV Z Q, et al. Optimized design and experiment on novel combination vacuum and spoon belt metering device for potato planters[J/OL]. Mathematical Problems in Engineering, 2020. DOI:10.1155/2020/1504642.
[12] 潘东彪,吴雪梅,苏国樟,等. 滚刷式烟叶铺平装置刷毛参数与结构设计[J]. 中国农机化学报,2016,37(8): 91-95.
[13] 魏懋健. 玉米/大豆精密播种机主动毛刷轮式导种机构研究[D]. 淄博: 山东理工大学,2023.
[14] 佟超. 零速投种技术及其理论设计[J]. 机械研究与应用,1995(1): 16-18, 25.
[15] 朱惠斌,吴宪,白丽珍,等. 基于EDEM-ADAMS仿真的稻茬地双轴破茬免耕装置研制[J]. 农业工程学报,2022,38(19): 10-22.
[16] 王东伟,纪瑞琪,何晓宁,等. 驱导组合槽辅助附种气吸式花生高速精量排种器研究[J]. 农业机械学报,2023,54(5): 59-70, 149.
[17] 李袁迪,张立强,郭鹏程,等. 基于ADAMS的油茶嫁接机关键结构设计与仿真[J]. 农机化研究,2025,47(7): 205-212.
[18] 郭鹏,郑效帅,王东伟,等. 气力辅助充种式花生精量排种器设计与试验[J]. 农业机械学报,2024,55(3): 64-74.
[19] 史嵩,张东兴,杨丽,等. 基于EDEM软件的气压组合孔式排种器充种性能模拟与验证[J]. 农业工程学报,2015,31(3): 62-69.
[20] 金秀南,张军昌,薛晶峰,等. 玉米种子与橡胶带离散元接触参数标定[J]. 农机化研究,2022,44(7): 39-43.
[21] 王云霞,梁志杰,张东兴,等. 基于离散元的玉米种子颗粒模型种间接触参数标定[J]. 农业工程学报,2016,32(22): 36-42.
[22] 崔涛,刘佳,杨丽,等. 基于高速摄像的玉米种子滚动摩擦特性试验与仿真[J]. 农业工程学报,2013,29(15): 34-41.
[23] 陈立东. 气吸式排种器性能参数设计及其对排种质量影响的试验研究[D]. 大庆: 黑龙江八一农垦大学,2006.
[24] MARKAUSKAS D, RAMIREZ-GMEZ A, KACIANAUS-KAS R, et al. Maize grain shape approaches for DEM modelling[J]. Computers and Electronics in Agriculture, 2015, 118: 247-258.
[25] 陈栋泉,李国莹,曹潘冬,等. 基于EDEM仿真玉米高位投种结构参数分析与试验[J]. 农机化研究,2024,46(2): 31-37.
[26] 衣淑娟,李怡凯,陈继国,等. 俯仰式播种单体仿形性能检测试验台设计与试验[J]. 农业机械学报,2024,55(2): 90-100.
[27] 王淞,赵斌,衣淑娟,等. 基于IGWO-LADRC的电动绿豆播种机控制系统研究[J]. 农业机械学报,2022,53(S1): 87-98.
[28] 赵硕,宗泽,刘刚. 基于电机驱动的定位施肥控制系统设计与试验[J]. 农业机械学报,2019,50(S1): 91-95, 114.
[29] 中华人民共和国农业农村部. 玉米免耕播种机作业质量: NY/T 1628-2008[S]. 北京: 中国农业出版社,2008.