摘要:摘要 针对庙沟铁矿露天转地下开采过程中现有系统设备老化,集控中心空间狭小无法满足矿山井下智能化开采要求等问题,从矿山地面与井下智能化建设角度出发,对该矿地表环网主干网络、
摘要 针对庙沟铁矿露天转地下开采过程中现有系统设备老化,集控中心空间狭小无法满足矿山井下智能化开采要求等问题,从矿山地面与井下智能化建设角度出发,对该矿地表环网主干网络、地表风机房、井下中央水泵房、破碎系统与电机车远程驾驶系统进行了智能化建设研究,形成露天转地下矿山综合一体化智能建设体系。矿山智能化建设完成后,非计划停工时间大幅降低,设备操作人员减少了30人,总体经济效益为255万元,有效提高了开采的综合管理与安全生产水平。研究成果可为其他露天转地下矿山智能化建设提供指导与借鉴。
关键词 露天转地下矿山;智能化;破碎系统;远程驾驶系统
论文《某露天转地下矿山智能化体系建设与应用》发表在《现代矿业》,版权归《现代矿业》所有。本文来自网络平台,仅供参考。
引言
矿山智能化建设对于优化矿山生产模式与提高矿产资源综合利用率具有重要作用,也对矿山生产过程中减少人员伤亡与加快和谐矿山的建设具有显著意义[1-3]。在矿山智能化建设研究方面,何斌全等[4]建立了柿竹园智能化建设总体框架,提出了基础通信网络、工业大数据中心、智能管控平台、智能采选系统等建设的具体内容;战凯等[5]分析了地下金属矿智能开采技术架构及关键技术,认为中国地下金属矿智能开采领域需要攻克开采连续化、无人装备作业集群化难题;李冬萍[6]提出了构建“系统+一网络+一平台+N智能应用”的智能化矿山建设架构,作为智能化矿山建设技术路线;向军[7]指出通过智能矿山建设,实现“少人化、无人化”是安全高效回采的关键举措,也是提升矿山安全本质安全水平的重要路径。综合文献分析,对于金属矿山智能化建设主要集中在整体构架的建设及未来发展趋势分析方面,而对于露天转地下矿山智能化建设方面提及较少。以庙沟铁矿露天转地下开采为工程背景,从矿山地面与井下智能化建设角度出发,对矿山的主要系统进行智能化建设研究,以实现矿山高效、低成本开采的目标。
1 矿山概况
庙沟铁矿经过约20a开采,目前已采至-408m标高附近,露天转地下开采工程包括主井矿石提升系统、副井人员及材料提升系统、粉矿回收系统、-80m破碎系统、0m排水系统、-240m放矿及矿岩运输系统等。除主井工程溜破系统、粉矿回收系统、副井-240m中段放矿机硐室、主副井井塔楼、35kV变电站、皮带通廊未建设完成外,其他各系统,如主井、副井、东西回风竖井、大小斜坡道斜井、各水平巷道掘进及支护工程已完成施工,陆续进入设备安装阶段。目前,矿山现有网络系统有待进一步更新,集控系统空间不足,亟需对露天转地下生产系统实施智能化建设研究。
2 地表主要设施智能化建设
2.1 庙沟铁矿通过在地面构建集调度指挥与数据网络于一体的智能化中心,为全矿数据共享、科学排产、智能设备管理、精准能源管控打下良好的基础。以露天转地下开采工程建设为契机,需要完成露天转地下开采系统智能化建设,实现井下生产智能化,以此带动地表及井下主要生产系统逐步实现智能化升级,完成露天转地下开采工程智能化建设,并且每年对见效快、实施必要性强的生产系统项目进行自动化改造,逐步完成主干网络、风机房及各生产系统的整体智慧矿山布局。
2.2 环网主干网络建设
2.2.1 控制环网主干网络建设
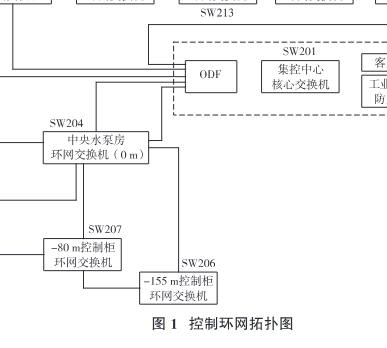
控制环网主干网络主要从集控中心内的机房出线,沿地表环网光纤线杆敷设至大斜坡道,通过挂钩敷设至主井0m中央水平环网交换机,经光模块沿盲提升竖井敷设至-80m破碎配电硐室环网交换机与-155m配电硐室控制柜环网交换机,然后经由破碎系统回风井回到0m中央水泵房二层核心交换机组成地下控制环网,再由中央水泵房环网交换机经副井回到地面经地表桥架、电缆沟回到集控中心组成环网,控制环网拓扑图如图1所示。
2.2.2 地表视频监测主干网络建设
对于视频监测主干网络的建设,主要从集控中心内的机房出线,沿电缆沟敷设至35kV变电站—西风井—副井—空压机站—主井—1#转运站—2#~3#转运站—4#~5#转运站所在位置的POE视频环网交换机,最终回到集控中心视频环网交换机,东风井视频环网交换机放射接入集控中心环网交换机,地表视频控制网络拓扑图如图2所示。
2.3 地表风机房智能化建设
地表风机房智能化建设目标为提高通风有效利用率,最大限度避免通风不足以及过度通风情况的发生,更有效地排出掘进工作面的矿尘及各种有害气体,在保障安全生产的条件下,降低能耗及人工成本。庙沟铁矿通风系统主要包括东、西风井的风机,主机设备配置应基本相同,风机电气系统一次回路采用相同的拓扑结构,控制系统功能及配置一致。
操作控制系统架构采用“视频监控+PLC控制”模式,采用EIC三电合一自动化控制,将变频器传动及高低压配电系统接口信号、切换柜状态监视信号、风机风门的操作与监视信号、风机在线监测及保护传感器信号接入到PLC控制站,集控中心内的操作人员可实现风机的远程控制和运行情况监控。风机控制系统为保证风机组能够满足逻辑和启停闭锁控制的智能化需要,核心元件采用西门子公司S7-1200系列可编程控制器。风机房自控系统架构如图3所示。
远控时,设备的控制和状态显示、报警均由集控中心后台监控系统实现,每个风机控制站点设置就地与远控操作接口;现场操作时,可单独控制每台风机,实现现场风机的启动、调频操作以及远程单台风机的调频正反转操作。任意风机故障时,可远程急停故障风机,不影响其他站点风机运行,各风机房内的风机均为单独控制和操作,互不干扰。正常时以远程操作为主,检修或故障时可采用就地控制,远程、就地的优先级根据要求确定,或采用互锁方式进行。每个风机房PLC控制站形成相对独立控制系统能独立运行,每台控制柜盘面设置人机界面,就地操作时,可显示系统状态。
3 井下主要设施智能化建设
3.1 中央水泵房智能化建设
中央水泵房智能化体系搭建的主要目的在于能够保证水泵房内主要设备和管路的全方位监控,对此采用布设视频监控的方式来实现,然而摄像头安装位置的选择要充分考虑到监控关键区域,实现水泵本体、主排水管路、泵房内环境及控制柜等所有设备的状态全方位监视。单个泵房内的视频信号统一汇总到一个单独的配电箱,通过光纤传输到地面集控中心。配电箱内置摄像头供电、视频信号转换及信号传输模块。
3.1.1 自控系统架构
中央水泵房自控系统构架如图4所示。系统架构主要由集中监控站、PLC控制站、和基本设备层3个层级组成,对各设备如主排水泵、引水回路、闸阀、球阀、传感器、仪表等进行管理和控制,整体布置如下:
(1) 监控层。形成1个集中监控站,排水系统后台的监控系统位于地面集控中心和现场,实现排水泵房的集中操控、状态监控,PLC分站组态、程序管理。
(2) 控制层。由PLC控制站组成,在中央水泵房有独立CPU,实现排水系统的控制,对所属泵房排水设备的信号采集、启停控制、逻辑控制、状态监控等功能。中央水泵房主PLC接入控制环网,保障网络通讯的可靠性。
3.1.2 自控系统功能
将0m中央水泵房、副井和粉矿回收井井窝水泵、-155m水平排水系统的排水设备作为整体控制区,配置PLC自动控制站及配电、操作设备,实现整个泵房的水泵集中控制和数据监测。配套的自动化系统,主要实现以下功能:
(1) 负责所有水泵及阀门仪表的启停控制、保护控制、数据采集、状态监视,提供泵房内所有设备的驱动回路及控制接口,多种操作方式的实现和转换。
(2) 有就地、远程、手动、自动多种操作控制方式,满足排水系统无人及检修、应急工况下的操作及控制。
(3) 根据矿山排水系统特点,编制多样化及适应性启泵排水控制工艺软件,实现水泵正常、节能等多种排水方式。
(4) 为上级自动化系统平台提供泵房内设备运行数据,接收集控室发送的调度指令,实现该泵房内所有设备的控制和状态监视。
3.2 井下破碎系统智能化建设
破碎控制系统为“视频监控+PLC控制”模式,采用EIC三电合一自动化控制。破碎机PLC站完成破碎机、振动放矿机、链式闸门、除尘风机、各种传感器、仪表的管理和控制,集控中心监控站负责所有设备的远程监视及集中调控管理。PLC读取碎前料仓及碎后料仓料位并上传,振动放矿机、颚式破碎机、料仓实现联锁控制,逆序启停。
当破碎机(振动放矿机)准备进行工作时,能够就地、远程发送预警信息,启动也会有所延迟,目的是对作业人员实施有效防护。当系统停机后,延时关闭除尘装置。振动放矿机采用变频电机,用于调节破碎机的给矿量,实时监测破碎腔内料位高度,将料位高度送入到PLC中,根据料位设定值,实现闭环调节振动放矿机变频器频率。远程监控站设置在地表集控中心,PLC控制站由破碎机成套PLC控制柜及破碎系统控制柜组成。破碎机成套PLC位于破碎机启动柜旁,破碎系统控制柜设置在破碎配电硐室,配置S7-1200型主控制CPU,柜内配置光纤交换机接入控制环网。破碎系统智能化控制架构如图5所示。
3.3 井下电机车远程驾驶系统智能化建设
3.3.1 远程驾驶系统逻辑构架
电机车远程驾驶系统是以提升运输效率、降低系统作业人员数量及运维成本为目标的矿山生产综合管理系统,能够显著提升采装与运输效率,优化生产运输调度,合理利用资源,降低生产成本,保障生产作业安全,是建设智能化、科技化及未来无人化矿山的重要支撑系统,其逻辑架构如图6所示。
3.3.2 调度中心控制系统
机车驾驶平台布置在地表集控中心,为了让从调度传达的信息准确发送给电机车驾驶人员,并及时得到信息反馈,实现一人控制多台电机车无人驾驶,从而更能保障运输安全,提高运输效率,推动实现矿山井下生产及运输自动化。井上机车驾驶平台如图7所示。
远程操作监视平台部署在采矿集控中心,可监视自动运行机车状态,并借助视频监控信息及系统派配信息,由驾驶人员远程操作控制机车。显示器上主要包括了图像、机车遥控及轨道运输3个监测系统。操控人员能够通过显示屏幕直接查看电机车运行相关的数据参数以及处于巷道中的其余机车所处的位置和相关监控信息,据此通过远程驾驶台来操作控制机车行驶。
3.3.3 多机车控制及反馈监视
控制系统能够实现多个机车的协同控制,机车运行过程中,利用系统自动信号切换功能可以实现对机车的有效调度及控制,通过监控画面能够观察电机车运行状态及控制模式,一旦发生故障情况,会触发声光报警,进行及时提醒。机车驾驶平台支持多种机车控制方式:
(1) 远程驾驶方式。驾驶人员通过远程驾驶平台,经由无线通信网络对机车进行实时行驶控制,实现有轨运输的无人化和高效化。
(2) 原有操作盘控制方式。远程驾驶方式控制方式不改变电机车的原有操作盘系统,机车司机仍可手动驾驶机车。
3.3.4 电机车检修预维护系统
通过开发电机车检修预维护系统,解决电机车维修依靠原始人工记录效率低下问题,系统通过记录每辆矿车行驶时间,定期检点车斗弓片、车斗间连接环等是否有裂痕。确保按时点检录入准确信息,当矿车轮对、车斗弓片、车斗间连接环等达到寿命使用临界值时,电机车检修预维护系统通过系统预警信息,通知相应人员进行设备更换,建立设备预知性分析平台,大幅降低非计划停工时间。
4 现场应用效果
矿山智能化建设完成后,有效排出掘进工作面的矿尘及各种有害气体,降低能耗,与此同时可实现整个泵房的水泵集中控制和数据监测。通过将机车驾驶平台布置在地表集控中心,实现一人控制多台电机车无人驾驶。与智能化建设前相比,风机房、中央水泵房、井下破碎站与电机车操作人员总人数由原来的48人减少为18人,按照人均年工资8.5万元考虑,总计实现经济效益255万元,非计划停工时间大幅降低,有效提高了开采的综合管理与安全生产水平。
5 结论
(1) 对于环网主干网络智能化建设,给出了控制环网主干网络及视频监测主干网络建设方法;对于风机房智能化建设,给出了自控系统架构、具体操控及主要功能实现方法。
(2) 中央水泵房实现了水泵本体,主排水管路,泵房内环境、控制柜等所有设备的状态全方位监视;破碎控制系统采用“视频监控+PLC控制”模式,可实现EIC三电合一自动化控制;机车驾驶平台布置在地表集控中心,可实现一人控制多台电机车无人驾驶。
(3) 系统智能化建设完成后,操作人员可由原来的48人减少为18人,总体经济效益为255万元,有效提高了庙沟铁矿露天转地下开采的综合管理与安全生产水平。
参考文献
[1] 丁亮亮,冯建,高大林,等. 白象山铁矿一键充填智能化系统研究与应用[J]. 现代矿业, 2022, 38(12): 18-21.
[2] 何晓武. 崩落转充填开采矿山的安全智能化监控预警技术研究[J]. 采矿技术, 2021, 21(3): 95-99.
[3] 郑向党,于小海,王秀东,等. 金川二矿区矿山智能化采矿的研究与探索[J]. 现代矿业, 2021, 37(11): 237-238, 251.
[4] 何斌全, 张维国, 伏彩萍, 等. 柿竹园多金属矿智能化建设思路[J]. 有色设备, 2022, 36(4): 1-5.
[5] 战凯,吕潇,金枫,等. 地下金属矿智能开采技术与装备现状及“十四五”的思考[J]. 智能矿山,2021, 2(1): 11-15.
[6] 李冬萍. 地下铜矿山智能化建设架构研究与应用[J]. 有色矿冶, 2023, 39(5): 58-61.
[7] 向军. 非煤地下矿山“少人化无人化”的实施路径[J]. 采矿技术, 2023, 23(5): 239-241.